В данном разделе мы рассмотрим группу ОЭПиС с общей технологией получения и обработки информации об удалённых объектах с помощью активных оптических систем, использующих явления отражения света и его рассеивания в прозрачных и полупрозрачных средах.
Эту группу оптических приборов объединяют под названием- Лида́р (транслитерация LIDAR англ. Light Identification, Detection and Ranging ) .
Устоявшийся перевод LIDAR как «лазерный радар» не вполне корректен, так как впервые аббревиатура LIDAR появилась в работе Миддлтона и Спилхауса «Метеорологические инструменты» 1953 года, задолго до изобретения лазеров. Первые лидары использовали в качестве источников света обычные или импульсные лампы со скоростными затворами, формировавшими короткий импульс. В современных системах ближнего радиуса действия (например, предназначенных для работы в помещениях) вместо лазеров используют обычные светодиоды. Однако именно применение лазера (обусловленное его свойствами: когерентности, высокой плотность и мощности излучения) позволило создать приборы с радиусами действия от сотен метров до сотен километров.
Первые полевые испытания носимого лазерного дальномера XM-23 с мощностью излучения 2.5 Вт и диапазоном измеряемых расстояний 200-9995 м прошли в 1963 году. Тогда же, в первой половине 1960-х годов, начались опыты по применению лидара с лазерным излучателями для исследования атмосферы. В 1969 году лазерный дальномер и мишень, установленная на Аполлоне-11, применялся для измерения расстояния от Земли до Луны. Четыре мишени, доставленные на Луну тремя «Аполлонами» и «Луноходом-2», и по сей день используются для наблюдения за орбитой Луны. В течение 1970-х годов, с одной стороны, отлаживалась технология лазерных дальномеров и компактных полупроводниковых лазеров, а с другой - были начаты исследования рассеяния лазерного луча в атмосфере..
Рассмотрение этой группы оптических приборов начнём с простейшего представителя-лазерного дальномера. Принцип работы основан на способности электромагнитного излучения распространяться с постоянной скоростью, что позволяет определять дальность до объекта. Так, при импульсном методе дальнометрирования используется следующее соотношение:
где R - расстояние до объекта, c - скорость света в вакууме, n - показатель преломления среды, в которой распространяется излучение, t - время прохождения импульса до цели и обратно.
Рисунок 132 Принцип работы лазерного дальномера.
Рассмотрение этого соотношения показывает, что потенциальная точность измерения дальности определяется точностью измерения времени прохождения импульса энергии до объекта и обратно. Ясно, что чем короче импульс, тем лучше. Задача определения расстояния между дальномером и целью сводится к измерению соответствующего интервала времени между зондирующим сигналом и сигналом, отраженным от цели. Различают три метода измерения дальности в зависимости от того, какой характер модуляции лазерного излучения используется в дальномере: импульсный, фазовый или фазо-импульсный.
Сущность импульсного метода дальнометрирования
состоит в том, что к объекту посылают зондирующий импульс, он же запускает временной счетчик в дальномере. Когда отраженный объектом импульс приходит к дальномеру, то он останавливает работу счетчика. По временному интервалу (задержке отраженного импульса) определяется расстояние до объекта.
При фазовом методе дальнометрирования
лазерное излучение модулируется по синусоидальному закону с помощью модулятора (электрооптического кристалла, изменяющего свои параметры под воздействием электрического сигнала). Обычно используют синусоидальный сигнал с частотой 10…150 МГц (измерительная частота). Отраженное излучение попадает в приемную оптику и фотоприемник, где выделяется модулирующий сигнал. В зависимости от дальности до объекта изменяется фаза отраженного сигнала относительно фазы сигнала в модуляторе. Измеряя разность фаз, определяют расстояние до объекта.
Общая структурная схема простейшего лидара представлена на рисунке 133 и схожа с прибором ночного видения, в современной военной технике они даже совмещаются.
Рисунок 133. Общая структурная схема простейшего лидара (1-лазер, 2-объект, 3-блок приёмника, 4- оптическая система ПОИ(телескопическая система), 5-ПОИ, 7-блок обработки и анализа, 7-блок вывода информации, 8- блок управления лазером.
На рисунке 134 представлен современный российский лазерный дальномер "Сажень-ТМ-Д" служащий для определения дальности до космических аппаратов, оснащенных лазерными ретрорефлекторами, и измерения угловых координат КА по отраженному солнечному излучению для расчета высокоточных параметров движения КА, а также получения фотометрической информации в видимом диапазоне длин волн.
В отличие от радиоволн, эффективно отражающихся только от достаточно крупных металлических целей, световые волны подвержены рассеиванию в любых средах, в том числе в воздухе, поэтому возможно не только определять расстояние до непрозрачных (отражающих свет) дискретных целей, но и фиксировать интенсивность рассеивания света в прозрачных средах.
Рисунок 134 Дальномер "Сажень-ТМ-Д"
Именно измерение интенсивности рассеяния лазерного излучения аэрозолем атмосферы дало второй сильный толчок для дальнейшего развития. Лидар посылает в атмосферу короткий импульс света и принимает обратно сигнал обратного рассеяния. Рассеяние света в атмосфере происходит как молекулами воздуха (Релеевское рассеяние), так и частицами аэрозоля. Таким образом, наличие аэрозоля в атмосфере увеличивает сигнал обратного рассеяния по сравнению с чистой атмосферой и концентрация аэрозоля может быть определена как функция расстояния и интенсивности сигнала на фоне чистой атмосферы. Несмотря на тот факт, что аэрозоли составляют не более 10 % от общей массы антропогенных загрязнителей атмосферы, потенциальный ущерб от этого типа загрязнителей, которые, как правило, представляют собой сильные токсиканты, существенно больше. «Атмосферные» лидары способны не только определять расстояния до непрозрачных отражающих целей, но и анализировать свойства прозрачной среды, рассеивающей свет. Разновидностью атмосферных лидаров являются доплеровские лидары , определяющие направление и скорость перемещения воздушных потоков в различных слоях атмосферы.
Физические принципы работы атмосферных лидаров мы с вами подробно рассматривали в разделе ИК газоанализаторов. Здесь мы остановимся на конструктивных особенностях лидаров данного типа. В качестве примера рассмотрим современную методику многоволнового лазерного дистанционного анализа опасных загрязнений атмосферы. Особенность заключается в том что лазерные источники могут одновременно генерировать излучение на нескольких длинах волн в одном направлении. Это позволяет:
проводить обнаружение и измерение концентраций нескольких компонент опасных примесей (до 6) одновременно в реальном масштабе времени;
существенно повысить точность измерения концентрации опасных примесей за счет уменьшения влияния временных флуктуаций принимаемого сигнала, обусловленных турбулентностью атмосферы.
В многоволновом лидаре в качестве базовых лазерных систем применяются импульсно-периодические лазеры на CO 2 и изотопах молекулы CO 2 (диапазон 9-11 мкм), а также могут использоваться их вторые (диапазон 4.5-5.5 мкм) и третьи (диапазон 3.0-3.4 мкм) гармоники, полученные при преобразовании частоты излучения базовых лазеров в нелинейных кристаллах типа AgGaSe 2 или ZnGeP 2 с эффективностью преобразования 5-10%. Принципиальным отличием от используемых в настоящее время стандартных схем дифференциального лазерного газоанализа, в которых определяемые компоненты воздуха детектируется одна за другой, в многоволновых лазерных системах они могут определяться практически одновременно за счет выхода в генерацию набора аналитических длин волн одновременно и их одновременного детектирования после прохождения атмосферного объема с повышенной концентрацией нескольких опасных газообразных веществ.
Схема применения лидара на основе многоволнового аммиачного лазера для контроля атмосферы приведен на рисунке 135. Блок – схема многоволнового лидара и его принципиальная оптическая схема приведены на рисунках 136 и 137.
Рисунок 135. Схема применения многоволнового лидара
Рисунок 136. Блок – схема многоволнового лидара
Рисунок 137. Принципиальная оптическая схема многоволнового лидара
(М – зеркала)
Многоволновой газоанализатор (дальность действия до 10км.), использующий новейшие методы дистанционного контроля, может эффективно использоваться в самых различных сферах производства и жизнедеятельности: контроль выбросов в атмосферу вблизи опасных химических производств;
контроль за газовыми и/или утечками на предприятиях ЯТЦ;
выявление предаварийных ситуаций, отслеживание обстановки по загрязненности атмосферы при аварийных ситуациях;
обеспечение безопасности важных объектов - правительственных зданий, военных объектов, АЭС и т.п.
дистанционный контроль (например, с борта самолета или беспилотного спутника) выбросов газов с объектов атомной промышленности в третьих странах с целью их идентификации, и следовательно, определения возможности этих стран по производству ядерного оружия;
определение динамики распространения ядовитых облаков в атмосфере при широкомасштабных авариях;
На рисунке 138 представлены двухволновый лидар ЛСА-2с и одноволновой лидар 4Р предназначенных для зондирования атмосферных аэрозолей и облаков.
Они имеют те же основные характерные блоки для лидаров:
-лазер-передатчик;
-передающая оптическая система;
-приемная оптическая система;
-спектроанализирующее и регистрирующее устройство (ФЭУ, CCD - камера, лавинный фотодиод);
-блок обработки сигнала;
-блок управления;
-система отображения полученной информации.
Рисунок 138. Двухволновый лидар ЛСА-2с и одноволновой лидар 4Р.
Как мы уже отмечали, основным излучателем в лидарах является лазер, формирующий короткие импульсы света высокой мгновенной мощности. Периодичность следования импульсов или модулирующая частота выбираются так, чтобы пауза между двумя последовательными импульсами была не меньше, чем время отклика от обнаружимых целей (которые могут физически находиться дальше, чем расчётный радиус действия прибора). Выбор длины волны зависит от функции лазера и требований к безопасности и скрытности прибора; наиболее часто применяются Nd:YAG-лазеры и длины волн (в нанометрах):
§ 1550 нм - инфракрасное излучение, невидимое ни глазу человека, ни типичным приборам ночного видения. Глаз не способен сфокусировать эти волны на поверхности сетчатки, поэтому травматический порог для волны 1550 существенно выше, чем для более коротких волн. Однако риск повреждения глаз на деле выше, чем у излучателей видимого света - так как глаз не реагирует на ИК излучение, то не срабатывает и естественный защитный рефлекс человека
§ 1064 нм - ближнее инфракрасное излучение неодимовых и иттербиевых лазеров, невидимое глазу, но обнаружимое приборами ночного видения
§ 532 нм - зелёное излучение неодимового лазера, эффективно «пробивающее» массы воды
§ 355 нм - ближнее ультрафиолетовое излучение
Задачи решаемые применением Лидаров:
· Исследования атмосферы
Исследования атмосферы стационарными лидарами остаётся наиболее публичной отраслью применения технологии. В мире развёрнуто несколько постоянно действующих исследовательских сетей (межгосударственных и университетских), наблюдающих за атмосферными явлениями.
· Измерение скорости и направления воздушных потоков.
Теоретическое обоснование применения наземного доплеровского лидара для таких измерений было дано ещё в 1980-е годы. Принцип действия основан на использовании эффекта Доплера, согласно которому, частота принятого сигнала, отражённого от цели может отличаться от частоты излучённого сигнала и разница зависит от соотношения скоростей объектов относительно друг друга. В 2001 Alcatel предложил размещение лидаров на борту спутников, так, что «созвездие» спутников на орбите способно отслеживать движение воздушных масс в рамках целого континента, а в потенциале - на Земле в целом.
· Измерение температуры атмосферы . Разработано и реализовано на практике несколько основных методов измерения профилей температуры.
В первом методе используется резонансное рассеяние на атомах щелочных металлов, в частности, натрия, калия, а также железа. Облака атомов металлов находятся на высоте 85 - 100 км. Температура измеряется по доплеровскому уширению резонансных линий с помощью зондирования узкополосным подстраиваемым лазером. Первые измерения были осуществлены с помощью искусственных натриевых облаков, забрасываемых в атмосферу ракетами. Несмотря на то, что метод ограничен диапазоном высот, на которых присутствуют атомы металла, рассеянный сигнал оказывается относительно большим, и это дает возможность измерять температуру с точностью до 1.5 ˚К.
Второй метод - метод рэлеевского рассеяния (Rayleigh lidar), основан на нерезонансном рассеянии света на молекулах воздуха. Впервые он был применен в 1953 году в опытах с прожекторным зондированием атмосферы. Суть метода заключается в следующем. Если отсутствует аэрозольное рассеяние, то мощность обратно рассеянного сигнала прямо пропорциональна плотности воздуха, из которой можно расcчитать температуру. Разрежение воздуха с высотой позволяет использовать метод рэлеевского рассеяния на высотах не более 90 км. Нижняя граница высоты измерения (около 20-30 км) обусловлена присутствием в граничном слое большого количества аэрозоля, который значительно увеличивает рассеяние, но практически не влияет на плотность воздуха.
Третий метод основан на вращательном рамановском (комбинационном) рассеянии молекулами воздуха (Raman lidar). Когда температура увеличивается, интенсивность переходов с большими квантовыми числами возрастает, в то время как интенсивность линий вращательного рамановского спектра, соответствующих маленьким квантовым числам, уменьшается. Переходы с большими квантовыми числами соответствуют линиям рамановского спектра, расположенным дальше от центральной частоты. Температура определяется при использовании измерений в двух областях спектра с различной температурной зависимостью. Максимальная высота зондирования составляет около 30 км, погрешность измерения менее 1 ˚К до высоты 10 км . Так как в приемнике линия упругого рассеяния подавляется, то измерения можно проводить и в присутствии значительных концентраций аэрозолей.
· Раннее оповещение о лесных пожарах.
· Исследования Земли
Вместо установки лидара на земле, где принимаемый отражённый свет будет зашумлён из-за рассеяния в загрязнённых, нижних слоях атмосферы, «атмосферный» лидар может быть поднят в воздух или на орбиту, что существенно улучшает соотношение сигнал-шум и эффективный радиус действия системы. Первый полноценный орбитальный лидар был выведен на орбиту NASA в декабре 1994 года в рамках программы LITE (Lidar In-Space Technology Experiment). Двухтонный лидар LITE с метровым зеркальным телескопом, поднятый на высоту 260 км, «рисовал» на земле размытое пятно диаметром 300 м, что было явно недостаточно для эффективного отображения рельефа, и был исключительно «атмосферным».
· Космическая геодезия.
Сканируют рельеф земной поверхности с приемлемой разрешающей способностью.
· Авиационная геодезия.
Национальная океанографическая служба США (NOAA) систематически применяет авиационные лидары для топографической съёмки морского побережья.
Особое направление, применяемое на практике в сейсмоопасных районах США - дифференциальное измерение высот с целью выявления локальных подвижек земных масс в районе разломов. Ещё в 1996 с помощью лидара была открыта неизвестная ранее зона разлома возле Сиэтла.
Совсем не давно с помощью подобного лидара группе ученых из Хьюстонского университета возможно, удалось найти в джунглях Гондураса легендарный Золотой город.
Рисунок 139 Применениепрежде засекреченной военными
технологию лазерного картографирования.
· Строительство и горное дело
Строительство - обмеры зданий, контроль отклонения плоскостей стен и несущих колонн от вертикали (в том числе в динамике), анализ вибраций стен и остекления. Обмеры котлованов, создание трёхмерных моделей стройплощадок для оценки объёмов земляных работ.
Архитектура - построение трёхмерных моделей городской среды для оценки влияния предлагаемых новостроек на облик города.
· Морские технологии
Измерение глубины моря. Для этой задачи используется дифференциальный лидар авиационного базирования. Красные волны почти полностью отражаются поверхностью моря, тогда как зелёные частично проникают в воду, рассеиваются в ней, и отражаются от морского дна. Технология пока не применяется в гражданской гидрографии из-за высокой погрешности измерений и малого диапазона измеряемых глубин.
Поиск рыбы. Аналогичными средствами можно обнаруживать признаки косяков рыбы в приповерхностных слоях воды. Специалисты американской государственной лаборатории ESRL утверждают, что поиск рыбы лёгкими самолётами, оборудованных лидарами, как минимум на порядок дешевле, чем с судов, оборудованных эхолотами.
· Промышленные и сервисные роботы
Системы машинного зрения ближнего радиуса действия для роботов, основанные на сканирующем лидаре IBM, формируют цилиндрическую развёртку с углом охвата горизонта 360° и вертикальным углом зрения до +30..-30
· Военные технологии
Здесь лидары получили самое широкое распространение и выполняют функции ооптико-локационной локации, разведки, наведения на цель итп.
Рисунок 139. Обнаружитель атакующих ракет (ОАР), Оптико-локационная станция ОЛС-35
Рисунок 140. Средство национального технического контроля испытаний стратегического вооружения в соответствии с международными Договорами.
4.8 ИНТЕРФЕРОМЕТРЫ
Интерферометры - это измерительные приборы, действие которых основано на явлении интерференции.
Работа приборов построена на последовательном разложение пучка излучения (на два или большее количество когерентных пучков каждый из них проходит различные оптические пути) и последующим их сложением, в результате создаётся интерференционная картина, по которой можно установить смещение фаз пучков.
С помощью интерферометров производится измерение угловых размеров звезд и угловых расстояний между звездами, измерение показателей преломления газов и жидкостей, а также определение концентрации примесей в воздухе. Интерферометры используются для контроля качества оптических деталей и их поверхностей, для контроля чистоты обработки металлических поверхностей.
Так как в основе принципа работы интерферометров лежит явление интерференции света, начнём изучение данной группы приборов с изучения этого явления.
Интерференции света - перераспределение интенсивности света в результате наложения (суперпозиции) нескольких световых волн. Это явление сопровождается чередующимися в пространстве максимумами и минимумами интенсивности. Её распределение называется интерференционной картиной.
Впервые явление интерференции было независимо обнаружено Робертом Бойлем (1627-1691 гг.) и Робертом Гуком (1635-1703 гг.). Они наблюдали возникновение разноцветной окраски тонких плёнок (интерференционных полос), подобных масляным или бензиновым пятнам на поверхности воды. В 1801 году Томас Юнг (1773-1829 гг.), введя «Принцип суперпозиции», первым объяснил явление интерференции света, ввел термин «интерференция» (1803). Он также выполнил первый демонстрационный эксперимент по наблюдению интерференции света, получив интерференцию от двух щелевых источников света (1802); позднее этот опыт Юнга стал классическим.
Рисунок 141. Опыт Юнга и Интерференция в тонкой плёнке.
Ещё один метод получения устойчивой интерференционной картины для света служит использование воздушных прослоек, основанное на одинаковой разности хода двух частей волны: одной - сразу отраженной от внутренней поверхности линзы и другой - прошедшей воздушную прослойку под ней и лишь затем отразившейся. Её можно получить, если положить плосковыпуклую линзу на стеклянную пластину выпуклостью вниз. При освещении линзы сверху монохроматическим светом образуется тёмное пятно в месте достаточно плотного соприкосновения линзы и пластинки, окружённое чередующимися тёмными и светлыми концентрическими кольцами разной интенсивности. Тёмные кольца соответствуют интерференционным минимумам, а светлые - максимумам, одновременно тёмные и светлые кольца являются изолиниями равной толщины воздушной прослойки. Измерив радиус светлого или тёмного кольца и определив его порядковый номер от центра, можно определить длину волны монохроматического света. Чем круче поверхность линзы, особенно ближе к краям, тем меньше расстояние между соседними светлыми или тёмными кольцами. Данная методика используется для контроля оптических деталей.
Рисунок 142. Кольца Ньютона
Разобрав явление интерференции, перейдём к рассмотрению схем построения интерферометров.
Интерферометр Майкельсона является одной из наиболее распространенных скелетных схем интерферометра, предназначенной для различных применений в случае, когда пространственное совмещение объектов, порождающих интерферирующие волны, невозможно или в силу каких-то причин нежелательно.
Рисунок 143. Интерферометр Майкельсона
Звездный интерферометр Майкельсона - интерферометр для измерения угловых размеров звёзд и углового расстояний между двойными звёздами. Если угловое расстояние между двумя звездами очень мало, в телескоп они видны как одна звезда. В таком случае говорят о двойных звездах и надо провести специальное наблюдение, чтобы отличить их от звезд одиночных. Для этого используется звездный интерферометр Майкельсона, который позволяет к тому же определить угловое расстояние между звездами.
Рисунок 143.Звёздный интерферометр Майкельсона
Лучи света, пришедшего от удаленной звезды, отражается от плоских зеркал M1 - M2, разнесенных на достаточно большое расстояние D, затем отражаются от двух других зеркал и собираются линзой на экране, помещенном в фокальной плоскости. Разнесенные на расстояние D зеркала можно рассматривать как точечные источники, расстояние между которыми и равно D. Вследствие этого в изображении звезды наблюдается интерференционная картина, аналогичная интерференции от двух щелей, расположенных на расстоянии D друг от друга. Угловое расстояние между соседними интерференционными максимумами в этой картине равно θ=λ/D, где λ – длина волны света. При наличии двух близких звёзд, находящихся на малом угловом расстоянии φ друг от друга, в телескопе образуются 2 интерференционные картины, которые также смещены на угол φ и накладываются друг на друга. В зависимости от соотношения углов θ и φ видимость полос суммарной картины будет различной. Изменяя расстояние D и, следовательно, изменяя угол θ, можно добиться совмещения максимумов одной интерференционной картины с минимумами другой, в результате чего видимость полос будет наихудшей. При этих условиях φ=½θ=λ/2D. Измерив D и зная λ, можно определить угловое расстояние между звёздами φ. Аналогично определяются угловые размеры одной звезды. Если звезду рассматривать как равномерно светящийся диск, то расчёт показывает, что исчезновение полос происходит при φ=1.22λ/D. Точность измерения звёздного интерферометра тем больше, чем больше база D. Построен звездный интерферометр, в котором D может достигать 18 м. что позволяет измерять угловое расстояние с точностью до 0,001". Для измерения угловых размеров очень слабых звёзд, свет от которых на уровне шумов, применяют метод корреляции интенсивностей.
Интерферометр Рождественского – это двухлучевой интерферометр, состоящий из 2-х зеркал M1 , M2 и двух параллельных полупрозрачных пластин P1 , P2; M1, P1 и M2, P2 устанавливаются попарно параллельно, но М1 и М2 наклонены относительно друг друга на малый угол; расстояние М1Р1 = М2Р2 и M1P2=P1M2. Луч света разделяется пластиной Р1 на 2 луча, которые после отражений от M1 , M2 и прохождения Р2 оказываются параллельными с разностью фаз
δ = (4πD/λ)(cos i1 - cos i2).
Рисунок 144. Интерферометр Рождественского
Поскольку δ не зависит от положения лучей на зеркалах и определяется лишь углами падения, интерференционная картина будет локализована на бесконечности (или в фокальной плоскости объектива О). Параллельному пучку лучей, падающих на Интерферометр Рождественского, соответствует одна точка интерференционно картины, и, следовательно, для наблюдения всей картины необходим пучок конечной апертуры. Вид картины (порядок и ширина полос, их ориентация) зависит от наклона зеркал M1 и M2. Если, например, ребро двугранного угла, образованного M1 и M2, вертикально (перпендикулярно чертежу), то даже при очень малой разности (i1-i2) полосы сравнительно высокого порядка (D велико) вертикальны и почти параллельны.Если же ребро двугранного угла горизонтально, то в поле зрении находятся горизонтальные полосы низкого порядка (в т.ч. нулевая), видные и в белом свете. Введение в один из пучков к.-л. прозрачного объекта, например пластинки, изменяет ширину, порядок и ориентацию полос: нулевая полоса не горизонтальна и появляется при некоторой промежуточной ориентации M1 и M2 ; при очень большой толщине этой пластинки в белом свете можно видеть только очень узкие, почти вертикальные полосы, когда ребро угла между M1 и M2 почти вертикально. Ширина полос зависит от угла между M1 и Р1, увеличиваясь с его уменьшением. Если все зеркала и пластины параллельны, то в отсутствие неоднородностей ширина полос бесконечна (интерференционное поле равномерно освещено).
Интерферометр Жамена (интерференционный рефрактометр) - интерферометр для измерения показателей преломления газов и жидкостей, а также для определения концентрации примесей в воздухе.
Интерферометр Жамена состоит из двух одинаковых толстых плоскопараллельных пластинок из стекла(или кварца), установленных почти параллельно друг другу. Пучок света падает на первую пластинку под углом i, близким к 45°. Каждый луч пучка после отражения на поверхностях пластинки делится на 2 когерентных луча S1 и S2 , идущих на некотором расстоянии друг от друга, зависящем от толщины пластинок d. Далее на второй пластинке каждый из них аналогичным образом разделяется на два луча. В результате от второй пластинки идут 4 параллельных когерентных луча S1’, S1”, S2’, S2”; Средние пучки S1” И S2’ налагаются и образуют интерференционную картину в фокальной плоскости объектива О1.
Рисунок 145. Схема интерферометра Жамена: ОО – ось вращения компенсаторных пластинок; L – лимб поворота компенсатора; О1 и О2 – объектив и окуляр зрительной трубы.
Разность хода между ними равна
где n п - показатель преломления пластинок.
φ - угол междуними.
При (φ ≈ 5′ - 15′ ∆ мала, поэтому при использовании источника белого света наблюдаются только интерференционные полосы низкою порядка, которые имеют форму прямых линий с белой ахроматической полосой в центре, окружённой системой окрашенных полос.).
Сравнительно большое расстояние между лучами S1 и S2 , позволяет установить на их пути две кюветы К1 и К2 одинаковой длины l с исследуемыми веществами, показатели преломления которых n1 и п2. Возникающая разность хода, что вызовет смещение интерференционной картины.
∆ = (n2-n1)l = δnl
С помощью Интерферометра Жамена проводят количественный анализ газовых смесей - определяют концентрацию некоторых газообразных примесей, например метана и СО2 , в воздухе шахт (т. к. n зависит от природы газа).
Интерферометр Физо- один из простейших интерферометров применяемый главным образом для контроля точности изготовления плоских поверхностей оптич. деталей.
Свет от монохроматического источника L с помощью конденсора O1 диафрагмы D и объектива О2 направляется параллельным пучком на эталонную Э и контролируемую К пластинки (положенные одна на другую) почти перпендикулярно к их поверхностям. При этом строго плоская эталонная и контролируемая поверхности пластинок образуют между собой небольшой угол a. С помощью полупрозрачной пластинки П в отражённом свете наблюдаются интерференционные полосы равной толщины,которыерые локализованы в области воздушного клина между контролируемой и эталонной поверхностями.
Рисунок 146. Интерферометр Физо; а - Вид дефектов сверху на контролируемой пластинке; б - Сечение эталонной и контрольной пластинок. Сечение по линии А-А (угол a и размеры дефектов для наглядности сильно увеличены); в - Вид интерференционной картины полос равной толщины в интерферометре Физо.
Положения этих полос определяются из условия: D=2dn+l/2=ml=const (при п~1), где d - толщина воздушного клина. Если контролируемая поверхность идеально плоская, то полосы равного наклона имеют форму прямых эквидистантных линий, параллельных ребру клина (d=const), расстояние между к-рыми равно z=l/2a (рис. 2, в) (при a=10"" и l~0,5 мкм, z=5 мм). Если же на контролируемой поверхности имеются к--л. дефекты, например, небольшие углубления или выступы, как на рисунке или она не строго плоская, то в области расположения этих дефектов наблюдаются отклонения dz от прямолинейности. При этом относит, величина отклонения dz/z связана с высотой или глубиной дефекта dh соотношением dh=(l/2)dz/z.
Невооружённый глаз может оценить величину dz/z~0,l, что соответствует величине обнаруженного дефекта dh=l/20 (при l=0,633 мкм, dh=0,031 мкм). Знак отклонения позволяет отличить тип дефекта: углубление или выступ. Если контролируемая поверхность имеет форму сферы, то интерференционные полосы имеют форму концентрических окружностей (см. Ньютона кольца). В интерферометре Физо поверхности контролируемой и эталонной пластинок из-за малости угла (угл. секунды) почти полностью соприкасаются друг с другом и в процессе юстировки могут быть повреждены. Поэтому для контроля поверхностей часто используются бесконтактные интерферометры, построенные по схеме интерферометра Майкельсона.
Рисунок 147. Интерферометр Физо конструкции Романова предназначен для бесконтактного измерения формы плоских полированных поверхностей и зеркал. Программное обеспечение предназначено для обработки интерференционных картин с дополнительно введёнными наклонами.
Литература.
- Д. Н. Черкасова, А. В. Бахолдин / «Оптические офтальмологические приборы и системы Часть I»/ Санкт-Петербург 2010.
- Лукин С.Б. / «КОНСПЕКТ ЛЕКЦИЙ ПО КУРСУ ОЭС» / СПбГУ ИТМО 2004г.
- Латыев С.М./ « Конструирование точных (оптических) приборов»/ Электронный учебник по дисциплине: "Основы конструирования оптических приборов". СПбГУ ИТМО
- А.Л. Андреев / «Автоматизированные телевизионные системы наблюдения» / СПбГУ ИТМО
- Митрофанов С.С / «Теоретические и физические основы устройства ОП»/ Электронный учебник по дисциплине: "Прикладная оптика". СПбГУ ИТМО, кафедра КиПОП
- http://biggest.su/samyj-bolshoj-teleskop/
7. В. Самохин, Н. Терехова/ «Видеопроекция сегодня и завтра»
8. М.А. Кустикова, М.Н. Мешалкина, В.Л. Мусяков, А.Н. Тимофеев/ «Методические указания к лабораторным работам по разделу «ОПТИКО-ЭЛЕКТРОННЫЕ ГАЗОАНАЛИЗАТОРЫ» курса «ЭКОЛОГИЧЕСКИЙ МОНИТОРИНГ»
10. http://www.krugosvet.ru/enc/nauka_i_tehnika/fizika/OPTIKA.html?page=4,6
11. .Захарьевский А.Н. «Интерферометры» 1952.
12. М.М. Мирошников / «Теоретические основы ОЭП»/ «Машиностроение « 1977г.
13. М.М. Русинов / «Габаритные расчёты оптических систем» Москва 1963
14. Г.Г. Ишанин, М. Г. Козлов, К.А. Томский / «Основы светотехники»/ СПб 2004г
В статье представлен общий обзор технологии лазерного сканирования объектов в пространстве, рассмотрены устройства, реализующие эту технологию и применяющиеся в мобильных робототехнических комплексах.
ОБЗОР ТЕХНОЛОГИИ LIDAR
Термин LIDAR (от англ. Light Detection and Ranging) относится к системам радиолокации, работающим в оптическом диапазоне и использующим в качестве источника излучения лазер. Часто в зарубежных источниках можно встретить аналогичные термины – LADAR (Laser Detection and Ranging) и Laser Radar. В мобильных наземных робототехнических комплексах и беспилотных летательных аппаратах (БПЛА) эта технология играет очень важную роль: она используется для автоматического построения трёхмерной карты (сцены) окружающего пространства и пространственной ориентации аппарата. Существуют разные варианты систем LIDAR, но в общем случае все они включают следующие ключевые элементы, определяющие принцип работы системы: ● источник фотонов (чаще всего это лазер);
● детектор фотонов;
● тактирующая цепь;
● оптическая приёмопередающая часть .
Системы LIDAR времяпролётного типа (Time-of-Flight, ToF) используют короткие импульсы лазерного излучения, с высокой точностью фиксируя моменты их передачи и приёма откликов (отражённых сигналов), чтобы вычислить расстояния до объектов в окружающем пространстве или на поверхности земли (например, при топосъёмке с БПЛА). После объединения серии таких измерений с информацией о местоположении и ориентации аппарата, создаётся результирующая трёхмерная сцена интересующей области пространства. Чаще всего эта сцена сохраняется в виде массива координат (x, y, z), называемого облаком точек.
Несмотря на то, что существует множество устройств LIDAR для разных областей применения, все они состоят из похожего набора функциональных узлов (см. рис. 1), таких как:
● подсистема измерения расстояния (лазерный передатчик и приёмник);
● сканирующая подсистема;
● подсистема позиционирования и ориентации;
● система управления;
● хранилище данных.
ПОДСИСТЕМА ИЗМЕРЕНИЯ РАССТОЯНИЯ
Принципиальные отличия отдельных устройств LIDAR заключаются в реализации функции измерения расстояния. Важнейший узел системы LIDAR – подсистема измерения расстояния – состоит, в свою очередь, из таких внутренних подсистем, как лазерный передатчик и электрооптический приёмник. Лазерный передатчик излучает энергию в виде сфокусированного луча, который до выхода из устройства про- ходит через ряд преобразовательных компонентов: переключатель приёмопередатчика, расширители луча, выходная телескопическая оптика и другое. В системе LIDAR могут использоваться различные типы лазеров, но чаще всего применяют твердотельный Nd:YAG-лазер, активной средой в котором выступает алюмо-иттриевый гранат (Y3Al5O12), легированный ионами неодима. Лазерные сканирующие дальномеры работают на различных длинах волн, но чаще других используются следующие:
● 1064 нм (ближний инфракрасный диапазон) – для топографических сканеров;
● 532 нм (зелёный) – для батиметрических (измеряющих глубину) сканеров;
● 600–1000 нм – для наземных устройств, предназначенных для коммерческого использования;
● ∼1500 нм – для наземных сканирующих систем, используемых в научных целях.
Выбор длины волны лазерного излучателя зависит от целого ряда факторов:
● отражающих свойств сканируемых объектов;
● характеристик окружающей среды;
● чувствительности используемого детектора;
● необходимой степени безопасности для глаз;
● требований к конструкции устройства.
Помимо длины волны излучения нужно также учитывать мощность лазера. Электрооптический приёмник получает энергию лазерного луча, отражённого или рассеянного целью, и фокусирует её на светочувствительном детекторе при помощи входной оптики.
Методы определения расстояния
Зафиксированные значения моментов передачи и приёма лазерного луча используются для расчёта времени, проведённого светом в пути, и, следовательно, расстояния до объекта, отразившего луч. В системе LIDAR обычно используется один из двух режимов, определяющих метод измерения расстояния: импульсный режим или режим непрерывной волны. В системах с импульсной модуляцией, также известных как время пролётные системы, лазером излучаются единичные световые импульсы с высокой частотой следования. Измеряется время, прошедшее c момента излучения импульсного сигнала до момента воз- врата отклика в приёмник. Расстояние до точки поверхности объекта, в которой произошло отражение лазерного луча, может быть вычислено по формуле: D = 0,5 × c × t, (1) где c – скорость света, t – полное время прохождения светом пути до точки отражения и обратно (раундтрип), D – искомое расстояние до точки отражения. В системах с непрерывной волной лазер излучает непрерывный сигнал, к которому затем применяется синусоидальная амплитудная модуляция. В этом случае время прохождения светом полного пути от передатчика до приёмника будет прямо пропорционально сдвигу фаз в излучённом и принятом сигналах: (2) где ϕ – фазовый сдвиг, T – период сигнала. После определения времени t про- хождения луча, расстояние D, как и в первом случае, вычисляется по формуле (1). Для снижения неопределённости может быть использована многотоновая синусоидальная модуляция. Также в системах с непрерывной волной используется альтернативный метод – с линейной частотной модуляцией. В таких системах переданный и принятый сигналы смешиваются, а для демодуляции и получения информации, содержащейся в несу- щей частоте, используется когерентный приёмник. Нужно отметить, что в уравнениях (1) и (2) предполагается, что детектор в течение времени t стационарен. Для случаев с передвигающимся детектором необходимо будет внести в уравнения соответствующие поправки.
Методы детекции
Обычно в системах LIDAR используется два способа детекции: прямая и когерентная. При прямой детекции приёмник преобразует сигнал непосредственно в напряжение или ток, который пропорционален входящей оптической мощности. Приёмники могут включать лавинные фотодиоды и фотоэлектронные умножители. LIDAR-детекторы также могут работать в режиме счёта фотонов. В этом режиме детектор способен регистрировать даже очень небольшое количество фотонов, а в режиме счётчика Гейгера становится чувствительным даже к отдельным фотонам. Электронная схема приёмника производит измерение генерируемого тока с поправкой на время пролёта фотонов в приёмнике, в результате чего получается прямое измерение момента приёма оптического отклика. При когерентной детекции полученный оптический сигнал смешивается с локальным осциллятором посредством гетеродина, и только после этого фокусируется на фоточувствительном элементе. При смешивании информация преобразуется в узкополосный сигнал, что снижает шум по сравнению с методом прямого детектирования, где используется оптический фильтр.
Бегущий луч и массив
Важно отметить, что описанные методы определения расстояния и способы детектирования требуют различной геометрии приёмников. В целом, большинство коммерческих систем LIDAR работают по принципу «бегущего луча», где для одного излучённого импульса фиксируется один или несколько (как правило, от 2 до 5) значений расстояния для оптических сигналов, вернувшихся вдоль одной и той же линии визирования (множественные возвраты). Для следующего импульса подсистема целеуказания изменяет направление линии визирования, и затем снова записывается несколько значений расстояния. Этот метод – метод точечного сканирования – обычно применяется в системах LIDAR, работающих в линейном режиме, при котором энергия лазера фокусируется на малой области исследуемой поверхности, и требуется достаточно сильный отражённый сигнал для записи отклика и расчёта дистанции. Однако существуют также системы LIDAR, которые используют лазерное излучение для засветки большой площади поверхности. При этом они оснащены покадровым матричным детектором с целью измерения значений расстояния для каждого пикселя в массиве. Этим системам с кадровой развёрткой требуется небольшая сила отражённо- го сигнала. Они записывают сотни или даже тысячи расстояний для излучённого импульса.
ПОДСИСТЕМА РАЗВЁРТКИ (СКАНИРОВАНИЯ)
В тех случаях, когда необходимо не просто определить расстояние до объекта, а сделать обзор целевой области, система LIDAR должна производить измерения во множестве точек. Для построения сцены целевой области пространства используется комбинация движения LIDAR-устройства в целом и работы подсистемы развёртки, через которую проходит излучаемый оптический сигнал. Распространённый вариант реализации подсистемы развёртки основан на использовании качающегося зеркала. Последовательное изменение направления линии визирования, вдоль которой излучается оптический сигнал, осуществляется с помощью подвижного зеркала. Это зеркало поворачивается на ограниченный угол (угол обзора) вокруг оси, лежащей на его плоскости и, как правило, параллельной направлению движения устройства. Качание зеркала позволяет сканировать целевую область пространства и формировать сцену нужной ширины, определяемой углом качания зеркала (см. рис. 2).
 Рис. 2. Система развёртки с качающимся
Рис. 2. Система развёртки с качающимсязеркалом
Подсистема на основе качающегося зеркала создаёт синусоидальную развёртку. При этом частота качания обратно пропорциональна задан- ному углу обзора (ширине сцены). Основной недостаток такого способа развёртки – непостоянная скорость движения зеркала. Дважды в течение рабочего цикла зеркало должно замедлиться, полностью остановиться, изменить направление движения на противоположное и вновь ускориться. В результате измерения, производимые с постоянной частотой, формируют сцену с неравномерной плотностью точек (меньше точек в середине полосы сканирования и больше по краям). Подсистема развёртки лазерного луча с помощью качающегося зеркала применяется, в частности, в лазерных сканерах фирм Leica и Optech . Альтернативный способ сканирования основан на использовании вращающейся призмы. В такой подсистеме развёртки многогранная призма с зеркальными гранями непрерывно вращается вокруг своей оси симметрии. Лазерный луч переходит от одной грани призмы к другой скачкообразно, в результате чего массив точек, формирующийся при движении устройства, состоит из ряда параллельных линий (см. рис. 3).
 Рис. 3. Система развёртки с вращающейся
Рис. 3. Система развёртки с вращающейсяпризмой
Этот вариант лишён недостатков качающегося зеркала, однако он сложнее в реализации и в том, что касается обработки результатов измерений. Системы LIDAR с вращающейся призмой производит австрийская фирма Riegl . Третий вариант подсистемы сканирования использует вращающееся зеркало. Ось вращения в этом варианте расположена почти перпендикулярно к поверхности зеркала (см. рис. 4).
 Рис. 4. Сканирующая система с вращающимся
Рис. 4. Сканирующая система с вращающимсязеркалом
За счёт отклонения поверхности зеркала от плоскости, перпендикулярной к оси вращения, формируется развёртка отражённого лазерного луча в виде эллиптической кривой. Преимущество метода заключается в том, что каждая точка пространства сканируется дважды. Вместе с тем эллиптическая развёртка значительно усложняет обработку результатов сканирования, так как обработка двойных измерений является весьма сложной задачей. Кроме того, поскольку точки в одной и той же области получены с разных позиций (так как система движется и меняет ориентацию в пространстве), полученное таким способом облако точек может содержать большое количество «шумов» . Примерами систем, использующих развёртку лазерного луча с помощью вращающегося зеркала, являются сканеры Leica AHAB DragonEye. В качестве альтернативы механической развёртке в настоящее время существует применяемая в некоторых системах LIDAR оптоволоконная подсистема для направления лазерного луча на целевую область. При таком способе достигается более стабильная геометрия сканирования, благодаря фиксированным связям между оптоволоконными каналами и другими оптическими каналами устройства. Лазерный луч направляется с помощью оптоволоконного пучка, а направление сканирования для каждого импульса зависит от того, из какого оптоволоконного канала он излучается. Подобная система пучков используется и в приёмной оптике (см. рис. 5).

ПОДСИСТЕМА ПОЗИЦИОНИРОВАНИЯ И ОРИЕНТАЦИИ
Для практического использования информации, получаемой с помощью сканирующих лазерных дальномеров, одного только массива значений расстояния от устройства до объектов и величин относительных углов сканирования недостаточно. Достоверность данных об окружающем пространстве (получаемых в виде трёхмерного облака точек или двумерного изображения с данными о расстояниях) может быть достигнута только при условии, что для каждой точки измеряются абсолютные значения положения и ориентации несущей платформы системы LIDAR в пространстве в момент приёма отклика от импульса. Для таких измерений используется подсистема ориентации и позиционирования. Эта подсистема включает в себя два основных компонента: приёмный модуль системы глобального позиционирования (ГЛОНАСС или GPS) и блок инерциальной навигации (IMU). Данные GPS-приёмника используются для записи местоположений несущей платформы в определённые моменты времени. Из множества существующих методов уточнения GPS-координат, в системах LIDAR, как правило, применяется дифференциальная постобработка сигнала со стационарной базовой станции или дифференциальные обновления в реальном времени. Для получения более точных наборов данных накладываются строгие ограничения на размещение базовой станции относительно платформы лазерного дальномера. Ориентация платформы измеряется при помощи блока инерциального измерительного устройства, в котором используются гироскопы и акселерометры. Данные GPS и IMU записываются во время движения плат- формы и объединяются (обычно во время шага постобработки данных).
СИСТЕМА УПРАВЛЕНИЯ (СИСТЕМНЫЙ КОНТРОЛЛЕР)
Для генерации облака точек все подсистемы, составляющие систему LIDAR, должны работать совместно. Качество полученных данных напрямую зависит не только от параметров каждой подсистемы, но и от взаимосогласованности их работы. Выставление параметров сенсоров и контроль работы подсистем осуществляет системный контроллер лазерного дальномера.
ХРАНИЛИЩЕ ДАННЫХ
Конечные данные LIDAR представляют собой файлы со значениями координат GPS и IMU, с измеренными значениями расстояний и иногда с информацией от других подсистем. Поскольку системы LIDAR могут генерировать очень большие объёмы данных, в системе предусмотрен накопитель, на который данные сохраняются сразу после сбора.
ПРАКТИЧЕСКИЙ ПРИМЕР: VELODYNE HDL-64E
В качестве примера рассмотрим устройство лазерного сканирующего дальномера высокого разрешения HDL-64E, производимого компанией Velodyne. Именно этот 64-лучевой LIDAR с трёхмерным сканированием установлен на беспилотные автомобили, разработанные компанией Google. Лазерный дальномер стал одним из ключевых компонентов, позволившим сделать автомобиль по-настоящему автономным.

Устройство Velodyne, установленное на крыше беспилотного автомобиля (см. рис. 6), генерирует подробную трёхмерную карту окружающего пространства. Бортовой компьютер объединяет данные измерений, полученных с LIDAR, с картами высокого раз- решения, формируя различные модели данных, которые позволяют роботизированному автомобилю передвигаться самостоятельно, избегая столкновений с препятствиями и не нарушая правил дорожного движения . Модель дальномера HDL-64E имеет 64 пары излучатель-детектор, которые обеспечивают наличие равноотстоящих секторных полей обзора по 26,5°. Для обеспечения 360-градусного обзора по азимуту весь оптический блок закреплён на вращающемся основании (см. рис. 7) и вращается с частотой 600 оборотов в минуту.
 Рис. 7. Внешний вид лазерного дальномера
Рис. 7. Внешний вид лазерного дальномераHDL-64E
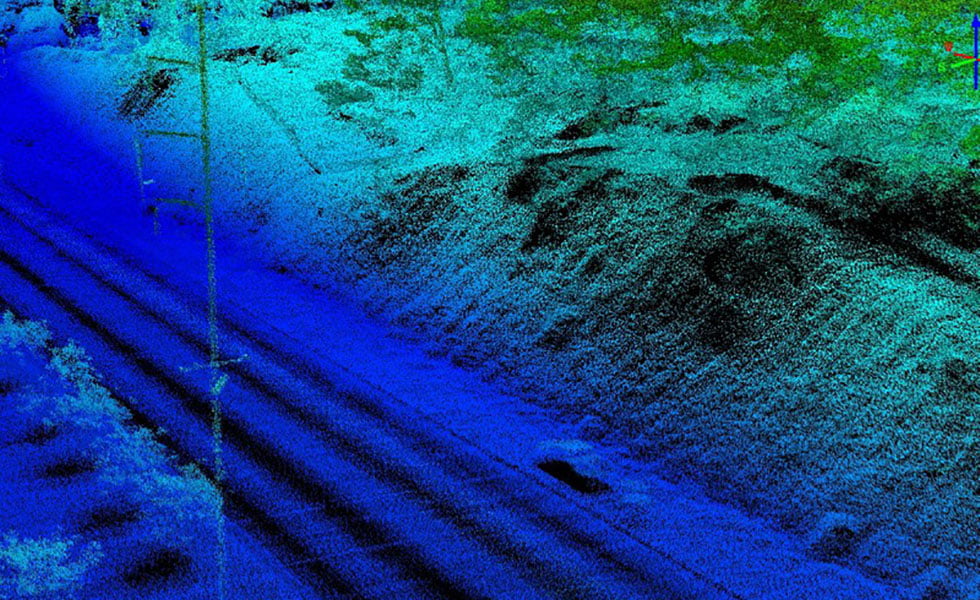
При необходимости эта частота регулируется в диапазоне 300…900 об/мин путём передачи простой текстовой команды через последовательный интерфейс. Этот же последовательный порт может быть использован для обновления прошивки сканера. Дальномер Velodyne обладает максимальным диапазоном измерения расстояния – до 120 м с погрешностью не более 2 см . Независимо от частоты вращения оптического блока, устройство постоянно генерирует большой объём данных – 1 млн точек в секунду, что соответствует горизонтальному угловому разрешению 0,05°. Устройство статически и динами- чески сбалансировано, что сводит к минимуму воздействие вибрации и обеспечивает стабильное изображение сцены. Каждый лазер дальномера HDL-64E излучает оптический импульс продолжительностью 5 нс (на уровне 50% амплитуды с максимальной пиковой мощностью 60 Вт). Высокое напряжение, необходимое для создания пикового тока в излучателе на уровне 30 А, генерируется схемой обратноходового преобразователя, что позволяет использовать для питания лазерной установки низкие напряжения. Выход- ной лазерный луч фокусируется линза- ми. При попадании на цель часть излучения отражается обратно в направлении источника. Этот отражённый свет проходит через отдельную систему линз и УФ-фильтр, необходимый для снижения фоновой оптической засветки (увеличения отношения сигнал/шум). Линзы приёмной системы фокусируют отражённое излучение на лавинный фотодиод, генерирующий электрический сигнал, пропорциональный интенсивности оптического. Лазер и лавинный фотодиод юстируются на заводе-изготовителе для обеспечения максимальной чувствительности при минимизации перекрёстных сигнальных помех, образуя, таким образом, наиболее эффективную пару излучатель-детектор. В соответствии с силой отражённого сигнала, детектируемого лавинным фотодиодом и схемой усилителя, система изменяет амплитуду лазерного импульса, поддерживая минимальный необходимый уровень излучения. Эта автоматическая подстройка мощности лазера, во-первых, снижает нагрев оптического блока и повышает его надёжность, а во-вторых, не даёт детекторам войти в режим насыщения. В противном случае, при получении детектором слишком большого количества оптической энергии, наступал бы режим насыщения, для выхода из которого детектору требуется значительное время (если оно превышает период следования импульсов, это неизбежно приводит к искажению детектируемого сигнала). В-третьих, если уровень сигнала сопоставим с шумом, что усложняет его детектирование, система автоматически повышает уровень мощности лазерного излучения. Это может происходить, например, в случае приближения к порогу чувствительности (120 м) или при слабом отражении от чёрной матовой поверхности. Выходной сигнал усиливается и передаётся на аналого-цифровой преобразователь с частотой дискре- тизации 3 ГГц. Затем оцифрованный сигнал с детектора передаётся в циф- ровой сигнальный процессор (DSP), использующий собственный алго- ритм анализа данных и определения времени возврата сигнала. Использо- вание коротких оптических импуль- сов в сочетании с высокочастотной обработкой сигнала обеспечивают большую разрешающую способность системы. Пары излучатель-детектор поделены на две группы по 32 лазера. Одна группа расположена в верхней части модуля и направлена на верхнюю половину поля обзора, а вторая группа, находящаяся под первой, направлена на нижнюю половину поля обзора. Поскольку верхний оптический блок предназначен для измерения бо′льших расстояний, угловое расстояние между оптическими импульсами у него больше, чем в нижнем блоке, который проводит измерения на более коротких дистанциях. Устройство предоставляет данные пользователю через стандартный порт 100BaseT Ethernet. Информация непрерывно передаётся в виде кадров. Частота генерации кадров равна часто- те вращения оптического блока (при 600 об/мин – 10 Гц). Объём данных, переданных за секунду, может содержать более миллиона точек. В пакетах данных содержится информация о расстоянии и интенсивности излучения для каждой пары излучатель-детектор, а также соответствующая угловая координата. Эти данные могут быть собраны с помощью стандартной утилиты сбора Ethernet-пакетов, например Wireshark , и визуализированы в компьютерной программе, такой как Velodyne Digital Sensor Recorder. Также полученные данные могут быть обработаны автономной навигационной системой для создания оценочной кар- ты, которая затем может использоваться для выявления препятствий, поиска оптимального маршрута и, в конечном итоге, для вычислений, связанных с рулевым управлением, торможением и ускорением. На рисунке 8 показан пример кадра данных с устройства HDL-64E, полученного при помощи приложения Velodyne Digital Sensor Recorder. Вблизи центра изображения различима белая точка, указывающая на положение сенсора. Для каждой пары излучатель-детектор сгенерированное облако точек представлено отдельным цветом. Пространственное представление данных формируется объединением двухмерных облаков точек. При вращении модуля набор точек от одной пары излучатель-детектор образует на ровной поверхности непрерывную окружность. Приведённый пример относится к варианту установки дальномера на крыше кабины грузовика, поэтому на изображении ниже белой точки имеется тёмная область – кузов. Как видно на рисунке, впереди грузовика находятся два транспортных средства: другой грузовик, пытающийся повернуть налево, и легковой автомобиль, пересекающий перекрёсток. Кроме того, позади легкового автомобиля на изображении видны дорожное ограждение, земля и деревья. Слева и справа от сенсора видны волнистые области, соответствующие дорожному ограждению и тротуару и выделяющие проезжую часть в поле зрения. Вдоль троту- ара различим кустарник. Полученные данные также позволяют определить дорожную ситуацию позади сенсора – на изображении имеется транс- портное средство, находящееся за грузовиком. Важно, что в любом из облаков точек нет разрывов в круговых данных (вокруг грузовика). Этот факт показывает, что частоты следования лазерных импульсов для верхнего и нижнего блоков дальномера сконфигурированы правильно. Если бы частота следования импульсов была ниже, чем требуется, то каждая из окружностей состояла бы из пунктирных линий. Пустые области на изображении возникают из-за находящихся на оптическом пути препятствий, не позволяющих получить данные о пространстве за ними (эффект затенения). Например, так возникает чёрная полоса позади кузова грузовика. Следует отметить, что устройство LIDAR также может быть установлено под углом 90° к вертикальной оси для изменения области обзора. Такая схема установки может быть использована в геодезических и картографических приложениях. Рассмотренный лазерный дальномер Velodyne HDL-64E относится к классу 1M, то есть считается безопасным для глаз. Сенсор помещён в водонепроницаемый корпус, сохраняет работоспособность при экстремальных темпера- турах и оптимален для использования в автомобилях. Основные технические характеристики устройства приведены в таблице.
Введение
Термин “лидар” является аббревиатурой английского выражения light identification, detection and ranging (обнаружение и определение дальности с помощью света).
Лидар - технология получения и обработки информации об удалённых объектах с помощью активных оптических систем, использующих явления отражения света и его рассеяния в прозрачных и полупрозрачных средах.
Как прибор, лидар представляет собой оптический локатор для дистанционного зондирования воздушных и водных сред. Также к лидарам относят оптические локаторы, которые позволяют дистанционно получать информацию о твердых объектах.
Лидары востребованы и пользуются популярностью благодаря достоинствам используемых в них лазерах:
· Когерентность излучения
· Малая длина волны излучения и, как следствие, малые потери из-за расходимости
· Мгновенная мощность излучения
Совокупность этих свойств делает использование лидара незаменимым на дистанциях от сотен метров до нескольких километров.
Принцип действия лидара
Импульсное излучение лазера посылается в атмосферу. Затем, рассеянное атмосферой в обратном направлении, излучение собирается телескопом и регистрируется фотоприемником с последующей оцифровкой сигналов.
импульсный лидар телеобъектив оптический
Лидар запускает быстрые короткие импульсы лазерного излучения на объект (поверхность) с частотой до 150000 импульсов в секунду. Датчик на приборе измеряет промежуток времени, необходимый для возврата импульса. Свет движется с постоянной и известной скоростью, поэтому лидар может вычислить расстояние между ним и цели с высокой точностью.
Существуют две основные категории импульсных лидаров: микроимпульсные и высокоэнергетические системы.
Микроимпульсные лидары работают на более мощной компьютерной технике с большими вычислительными возможностями.
Эти лазеры меньшей мощности и классифицируются как "безопасные для глаз", что позволяет использовать их практически без особых мер предосторожности.
Лидары с большой энергией импульса в основном применяются для исследования атмосферы, где они часто используются для измерения различных параметров атмосферы, таких как высота, наслоение и плотность облаков, свойства частиц облака, температуру, давление, ветер, влажность и концентрацию газов в атмосфере.
Устройство лидара

Большинство лидаров состоит из трех частей:
· Передающая часть
· Приемная часть
· Система управления
Передающая часть (а) лидара содержит источник излучения - лазер и оптическую систему для формирования выходного лазерного пучка, т.е. для управления размером выходного пятна и расходимостью пучка.
В абсолютном большинстве конструкций излучателем служит лазер, формирующий короткие импульсы света высокой мгновенной мощности. Периодичность следования импульсов или модулирующая частота выбираются так, чтобы пауза между двумя последовательными импульсами была не меньше, чем время отклика от обнаружимых целей (которые могут физически находиться дальше, чем расчётный радиус действия прибора). Выбор длины волны зависит от функции лазера и требований к безопасности и скрытности прибора; наиболее часто применяются Nd:YAG-лазеры и длины волн:
1550 нм -- инфракрасное излучение, невидимое ни глазу человека, ни типичным приборам ночного видения. Глаз не способен сфокусировать эти волны на поверхности сетчатки, поэтому травматический порог для волны 1550 существенно выше, чем для более коротких волн. Однако риск повреждения глаз на деле выше, чем у излучателей видимого света -- так как глаз не реагирует на ИК излучение, то не срабатывает и естественный защитный рефлекс человека
1064 нм -- ближнее инфракрасное излучение неодимовых и иттербиевых лазеров, невидимое глазу, но обнаружимое приборами ночного видения
532 нм -- зелёное излучение неодимового лазера, эффективно «пробивающее» массы воды
355 нм -- ближнее ультрафиолетовое излучение
Приёмная часть (б) состоит из объектива (телескоп), спектрального и/или пространственных фильтров, поляризационного элемента и фотодетектора. Излучение, отраженно-рассеянное от исследуемого объекта, концентрируется приемной оптикой (телескопом), а затем проходит через анализатор спектра. Этот прибор служит для выделения интервала длин волн, в котором проводятся наблюдения, и, следовательно, для отсечки фонового излучения на других длинах волн. Анализатор может представлять собой либо сложный, тщательно настраиваемый моно- или полихроматор, либо набор узкополосных фильтров, включая фильтр отсечки излучения на длине волны лазерного передатчика.
Излучатель и приемный блок могут быть далеко разнесены друг от друга или выполнены в едином блоке, что в последние годы является обычным. Оси излучателя и приемника могут быть совмещены (коаксиальная схема) или разнесены (биаксиальная схема).
Система управления(в) выполняет следующие задачи:
ѕ Управление режимом работы лидара;
ѕ Управление частотой зондирующего излучения лазера;
ѕ Измерение энергии излучения в выходящем и принимаемом двухчастотном лазерном пучке на обеих частотах;
ѕ Обработка результатов, т.е. получение спектральных характеристик атмосферы, определение наличия и концентраций примесей по имеющимся в базе данных компьютера «спектральным портретам» молекул;
ѕ Управление системой наведения лидара на исследуемый объект.
В своем исследовании я решил подробно рассмотреть схемы объективов, используемых в различных лидарах.
Вам необходимо документировать обстоятельства ночной аварии на дороге? Проектируете ирригационные системы в засушливых районах? Или изучаете возможные археологические памятники, скрытые лесом или другими деталями? Традиционные методы 3D-съемки и получения геопространственных данных затратны по времени и денежным средствам. Но теперь есть более эффективные и быстрые решения для таких целей.
LiDAR (Light Detection and Ranging) - это технология дистанционного зондирования, которая использует быстрые лазерные импульсы, чтобы создать модель рельефа. LiDAR отлично подходит, когда необходимо создать цифровые отображения поверхности земли с высоким разрешением для различных целей. В прошлом организации были вынуждены использовать в каждом случае отдельные системы со своими особенностями.
Теперь у них есть возможность пользоваться системой LiDAR, которую устанавливают на беспилотники, чтобы получилось единое устройство для 3D-картографирования. Систему ScanLook LiDAR серии А устанавливают на летающую платформу DJI Matrice 600, что позволяет получить для работы эффективное, универсальное и точное решение для 3D-зондирования на основе беспилотных технологий.
Примеры практического применения связки LiDAR и дронов
Моделирование ландшафта
Простейший пример, когда новые технологии могут существенно облегчить и сделать еще эффективнее работу - уборка мусора и грязи. Известно, что оплата обычно производится за квадратный метр, но расчеты не всегда бывают точны, особенно, если имеется большой разброс мусора, листьев, а на территории также растут кусты и деревья. LiDAR предлагает значительную экономию по сравнению с методами методам наземного исследования.

LiDAR значительно сокращает различного рода затраты на методы исследования рельефа. Применяя метод дистанционного исследования объектов разного типа, включая траву, листья или деревья, LiDAR может определить их положение, скорость перемещения (для движущихся объектов) и другие характеристики. Для этого используется пульсирующий лазерный луч, который отражается от поверхности объектов. Результатом такого процесса становится 3D-модель топографических контуров ландшафта, с которой затем могут работать пользователи. Если же подключить к процедуре исследования дрон Matrice 600 со ScanLock, то сканирование будет происходить со скоростью более 4 тыс. кв. м. в минуту. А теперь представьте, сколько можно сделать работы за 20 минут полетного времени?
Документирование ЧП и несчастных случаев
LiDAR - это активная система, которая использует для создания образов нужных объектов ультрафиолет и ближний инфракрасный диапазон. Это важно, если обстоятельства не позволяют задействовать для качественного картографирования внешнее освещение. Например, такой метод может потребоваться для съемок обстоятельств ночной автомобильной аварии. Для этого лучше всего задействовать дрон Matrice 600 с технологией ScanLook, чтобы буквально за один полет над местом аварии зафиксировать и обработать всю необходимую визуальную информацию.
Поскольку предлагаемое решение базируется на беспилотных технологиях, то пользователи практически немедленно получают точную информацию, подкрепленную визуальными деталями. Затем все это можно использовать в качестве доказательства в судебных процессах. Кроме этого, высокая скорость обследования с помощью воздушного сканирования помогает быстрее начать процесс эвакуации раненых или погибших людей, поврежденных автомобилей, а также быстрее приступать к уборке территории. Таким образом можно за сравнительно короткое время освободить проезжую часть для автомобилей, что особенно важно на оживленных трассах, а также сэкономить значительные средства на всех этапах работы.
Сельское хозяйства и ландшафтная планировка
Другой пример успешного применения новых технологий 3D-картографирования - большие фермы, где требуется создавать эффективную ирригационную систему. Например, на больших плантациях риса фермерам приходится создавать водозащитные насыпи. Это требует точного знания рельефа и особенностей почвы. Иначе вся создаваемая система может оказаться неэффективной и бесполезной. И опять оптимальным решением становится дрон Matrice 600 с установленной на нем технологией ScanLock. Сбор данных будет происходить со скоростью 183 метра за один проход. Процесс работы с одним большим полем не займет много времени. При этом не нужно, как раньше, ждать, когда обрабатываемые поля высохнут, чтобы на них можно было бы вывести соответствующую технику для сбора данных.
Археология
Там, где традиционные методы обследования больших, ценных с исторической точки зрения, ландшафтов требовали не одного года работы, теперь можно использовать технологию LiDAR, чтобы выполнить процесс по 3D-картографированию за считанные минуты. И снова наилучшим вариантом для такой процедуры будет установка ScanLock на дрон Matrice 600. “Потерянные” места и целые древние города будут открыты за самое короткое время.
Теги: Лидар, излучатель, сигнал, когерентный, некогерентный, сканирующая оптика
Лидары
Л идар (LIDAR англ. Light Identification Detection and Ranging - световое обнаружение и определение дальности) - технология получения и обработки информации об удалённых объектах с помощью активных оптических систем, использующих явления отражения света и его рассеяния в прозрачных и полупрозрачных средах.
Лидар как прибор представляет собой активный дальномер оптического диапазона. Сканирующие лидары в системах машинного зрения формируют двумерную или трёхмерную картину окружающего пространства. «Атмосферные» лидары способны не только определять расстояния до непрозрачных отражающих целей, но и анализировать свойства прозрачной среды, рассеивающей свет. Разновидностью атмосферных лидаров являются доплеровские лидары, определяющие направление и скорость перемещения воздушных потоков в различных слоях атмосферы.
Принцип действия
Принцип действия лидара не имеет больших отличий от радара: направленный луч источника излучения отражается от целей, возвращается к источнику и улавливается высокочувствительным приёмником (в случае лидара - светочувствительным полупроводниковым прибором); время отклика прямо пропорционально расстоянию до цели.

Принцип действия лидара прост. Объект (поверхность) освещается коротким световым импульсом, и измеряется время, через которое сигнал вернется к источнику. Свет распространяется очень быстро - 3∙10 8 м/с. Однако он возвращается с некоторой задержкой, которая зависит от расстояния до объекта.
Расстояние, которое прошел фотон на пути до объекта и обратно, можно рассчитать по формуле:
L = c ∙ t пролёта 2
Оборудование, необходимое для измерения этого малого промежутка времени, должно работать чрезвычайно быстро.
Лидар запускает быстрые короткие импульсы лазерного излучения на объект (поверхность) с частотой до 150000 импульсов в секунду. Датчик на приборе измеряет промежуток времени, необходимый для возврата импульса. Свет движется с постоянной скоростью, поэтому лидар может вычислить расстояние между ним и цели с высокой точностью.
Во всех случаях радиотехническая система обнаруживает сигналы на фоне помех. Считается, что полезный сигнал имеет частоту, равную резонансной частоте настройки системы ω c = ω 0 . Начальная фаза равна нулю:
U c t = U cm sin ω 0 t
Сумма сигнала и помехи:
U сп t = u с t + u п t = U cm + U п1 sin ω 0 t + U п2 cos ω 0 t
где U п1 и U п2 – амплитуды помех.
- Некогерентное детектирование (прямой метод измерения): Реагирование происходит на амплитуду суммарного колебания и помехи U спm .Превышением сигнала над помехой называется следующее отношение: m нкг 2 = U cm 2 U п1 2 + U п2 2 = U cm 2 2σ 2 где σ 2 – дисперсия каждой из амплитуд помехи U п1 и U п2
- Когерентное детектирование: Полностью исключает ортогональную к сигналу составляющую помех. Оно предусматривает реагирование лишь на колебание, равное сумме амплитуды сигнала Ucm и синфазной составляющей помехи U п1. Превышением сигнала над помехой при когерентном обнаружении называется отношение m нкг 2 = U cm 2 U _ п1 2 , где U _ п1 2 – дисперсия амплитуды синфазной составляющей. Когерентные системы лучше всего подходят для доплеровских или фазочувствительных измерений и, как правило, используют оптическое гетеродинное детектирование. Это позволяет им работать при гораздо меньшей мощности, но при этом конструкция фотоприемной схемы намного сложнее.
Существуют две основные категории импульсных лидаров: микроимпульсные и высокоэнергетические системы.
- Микроимпульсные лидары работают на более мощной компьютерной технике с большими вычислительными возможностями. Эти лазеры меньшей мощности и классифицируются как "безопасные для глаз", что позволяет использовать их практически без особых мер предосторожности.
- Лидары с большой энергией импульса в основном применяются для исследования атмосферы, где они часто используются для измерения различных параметров атмосферы, таких как высота, наслоение и плотность облаков, свойства частиц облака, температуру, давление, ветер, влажность и концентрацию газов в атмосфере.
В отличие от радиоволн, эффективно отражающихся только от достаточно крупных металлических целей, световые волны подвержены рассеиванию в любых средах, в том числе в воздухе, поэтому возможно не только определять расстояние до непрозрачных (отражающих свет) дискретных целей, но и фиксировать интенсивность рассеивания света в прозрачных средах. Возвращающийся отражённый сигнал проходит через ту же рассеивающую среду, что и луч от источника, подвергается вторичному рассеиванию, поэтому восстановление действительных параметров распределённой оптической среды - достаточно сложная задача, решаемая как аналитическими, так и эвристическими методами.
Излучатель
В абсолютном большинстве конструкций излучателем служит лазер, формирующий короткие импульсы света высокой мгновенной мощности. Периодичность следования импульсов или модулирующая частота выбираются так, чтобы пауза между двумя последовательными импульсами была не меньше, чем время отклика от обнаружимых целей (которые могут физически находиться дальше, чем расчётный радиус действия прибора). Выбор длины волны зависит от функции лазера и требований к безопасности и скрытности прибора; наиболее часто применяются Nd:YAG-лазеры и следующие длины волн (в нанометрах):
- 1550 нм - инфракрасное излучение, невидимое ни глазу человека, ни типичным приборам ночного видения. Глаз не способен сфокусировать эти волны на поверхности сетчатки, поэтому травматический порог для волны 1550 существенно выше, чем для более коротких волн
- 1064 нм - ближнее инфракрасное излучение неодимовых и иттербиевых лазеров, невидимое глазу, но обнаружимое приборами ночного видения
- 532 нм - зелёное излучение неодимового лазера, эффективно «пробивающее» массы воды
- 355 нм - ближнее ультрафиолетовое излучение
Также возможно использование вместо коротких импульсов непрерывной амплитудной модуляции излучения переменным напряжением.
Сканирующая оптика
Простейшие атмосферные лидарные системы не имеют средств наведения и направлены вертикально в зенит.
Для сканирования горизонта в одной плоскости применяются простые сканирующие головки. В них неподвижные излучатель и приёмник также направлены в зенит; под углом 45° к горизонту и линии излучения установлено зеркало, вращающееся вокруг оси излучения. В авиационных установках, где надо сканировать полосу, перпендикулярную направлению полёта самолёта-носителя, ось излучения - горизонтальна. Для синхронизации мотора, вращающего зеркало, и средств обработки принимаемого сигнала используются точные датчики положения ротора, а также неподвижные реперные риски, наносимые на прозрачный кожух сканирующей головки.
Сканирование в двух плоскостях добавляет к этой схеме механизм, поворачивающий зеркало на фиксированный угол с каждым оборотом головки - так формируется цилиндрическая развёртка окружающего мира. При наличии достаточной вычислительной мощности можно использовать жёстко закреплённое зеркало и пучок расходящихся лучей - в такой конструкции один «кадр» формируется за один оборот головки.
Приём и обработка сигнала
Важную роль играет динамический диапазон приёмного тракта. Чтобы избежать перегрузки приёмника интенсивной засветкой от рассеивания в «ближней зоне», в системах дальнего радиуса действия применяют высокоскоростные механические затворы, физически блокирующие приёмный оптический канал. В устройствах ближнего радиуса со временем отклика менее микросекунды такой возможности нет.
Современное состояние и перспективы
Исследования атмосферы
Исследования атмосферы стационарными лидарами является наиболее массовой отраслью применения технологии. В мире развёрнуто несколько постоянно действующих исследовательских сетей (межгосударственных и университетских), наблюдающих за атмосферными явлениями.
Раннее оповещение о лесных пожарах
Лидар, размещённый на возвышенности (на холме или на мачте) и сканирующий горизонт, способен различать аномалии в воздухе, порождённые очагами пожаров. В отличие от пассивных инфракрасных систем, распознающих только тепловые аномалии, лидар выявляет дымы по аномалиям, порождаемым частицами горения, изменению химического состава и прозрачности воздуха и т. п.
Исследования Земли
Вместо установки лидара на земле, где принимаемый отражённый свет будет зашумлён из-за рассеяния в загрязнённых, нижних слоях атмосферы, «атмосферный» лидар может быть поднят в воздух или на орбиту, что существенно улучшает соотношение сигнал-шум и эффективный радиус действия системы.
Строительство и горное дело
Лидары, сканирующие неподвижные объекты (здания, городской ландшафт, открытые горные выработки), относительно дёшевы: так как объект неподвижен, то особого быстродействия от системы обработки сигнала не требуется, а сам цикл обмера может занимать достаточно долгое время (минуты).
Морские технологии
Измерение глубины моря . Для этой задачи используется дифференциальный лидар авиационного базирования. Красные волны почти отражаются поверхностью моря, тогда как зелёные частично проникают в воду, рассеиваются в ней, и отражаются от морского дна. Технология пока не применяется в гражданской гидрографии из-за высокой погрешности измерений и малого диапазона измеряемых глубин.
Поиск рыбы . Аналогичными средствами можно обнаруживать признаки косяков рыбы в приповерхностных слоях воды. Специалисты американской государственной лаборатории ESRL утверждают, что поиск рыбы лёгкими самолётами, оборудованных лидарами, как минимум на порядок дешевле, чем с судов, оборудованных эхолотами.
Спасение людей на море . В 1999 ВМС США запатентовали конструкцию авиационного лидара, применимого для поиска людей и человеческих тел на поверхности моря; принципиальная новизна этой разработки - в применении оптического маскирования отражённого сигнала, снижающего влияние помех.
Разминирование . Обнаружение мин возможно с помощью лидаров, непосредственно погруженных в воду (например, с буя, буксируемого катером или вертолётом), однако не имеет особых преимуществ по сравнению с активными акустическими системами (сонарами).
На транспорте
Определение скорости транспортных средств . В Австралии простейшие лидары используются для определения скорости автомобилей - так же, как и полицейские радары. Оптический «радар» существенно компактнее традиционного, однако менее надёжен в определении скорости современных легковых автомобилей: отражения от наклонных плоскостей сложной формы «запутывают» лидар.
Беспилотные транспортные средства . В 1987-1995 годах в ходе проекта EUREKA Prometheus, стоившего Европейскому союзу более 1 млрд долларов, были выработаны первые практические разработки беспилотных автомобилей. Наиболее известный прототип, VaMP (разработчик - Университет бундесвера в Мюнхене) не использовал лидары из-за недостатка вычислительной мощности тогдашних процессоров. Новейшая их разработка, MuCAR-3 (2006), использует единственный лидар кругового обзора, поднятый высоко над крышей машины, наравне с направленной мультифокальной камерой обзора вперёд и инерциальной навигационной системой.
Промышленные и сервисные роботы . Системы машинного зрения ближнего радиуса действия для роботов, основанные на сканирующем лидаре IBM, формируют цилиндрическую развёртку с углом охвата горизонта 360° и вертикальным углом зрения до +30..-30°. Собственно дальномер, установленный внутри сканирующей оптической головки, работает на постоянном излучении малой мощности, модулированном несущей частотой порядка 10 МГц. Расстояние до целей (при несущей 10 МГц - не более 15 м) пропорционально сдвигу фаз между опорным генератором, модулирующим источник света, и ответным сигналом.
Ru-Cyrl 18- tutorial Sypachev S.S. 1989-04-14 [email protected] Stepan Sypachev students
Всё ещё не понятно? – пиши вопросы на ящик