АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
Управление, сопровождающееся непрерывным контролем, называют регулированием, а параметр, которым необходимо управлять, т. е. регулировать, - регулируемой величиной.
Регулирование, при котором управление осуществляется различными устройвами без вмешательства человека, называют автоматическим регулированием, а совокупность устройств, состоящих из измериельного элемента (первичного преобразователя), исполнительного механизма и регулирующего органа, называют автомашинным регулятором.
Система автоматического регулирования (рис. 1) представит собой совокупность отдельных элементов, направленно действующих друг на друга . В сравнивающем устройстве происходит сравнение текущего значения регулируемой величины X, которое поступает по главной обратной связи, с ее заданным значением X 0 .
Рис. 1 Схема системы автоматического регулирования
КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
Регуляторы разделяются по следующим признакам.
1.. По способу действия : регуляторы прямого и непрямого (косвенного) действия. У регуляторов прямого действия регулирующий орган перемещается за счет энергии Самого объекта, воздействующего на чувствительный элемент. У регуляторов непрямого действия регулирующий орган перемещается за счет дополнительного источника энергии (электроэнергия, сжатый воздух, жидкость под давлением).
2. По роду действия : регулятор прерывистого (дискретного) и непрерывного действия.
В регуляторах непрерывного действия непрерывному изменению регулируемого параметра соответствует непрерывное перемещение регулирующего органа, между входной и выходной величинами существует непрерывная функциональная связь.
В регуляторах прерывистого действия непрерывной функциональной связи нет. Прерывистые системы можно разделить на две основное группы: релейные и импульсные.
Релейной системой автоматического регулирования называется такая система, которая в своем составе среди основных элементов имеет хотя бы один релейный элемент. Под релейным элементом подразумевается такой элемент системы, в котором непрерывному изменению входной величины соответствует скачкоообразное изме-
нение выходной величины, появляющейся лишь при вполне определенных значениях входной величины (электромагнитное реле).
Импульсной системой автоматического регулирования называется такая система, которая в своем составе имеет хотя бы один-импульсный элемент. Импульсный элемент преобразует непрерывное входное воздействие в ряд кратковременных импульсов,появ-ляющихся через определенные промежутки времени.
3. По роду энергии : электрические пневматические, гидравлические, электрогидравлические и электропневматические.
По закону регулирования :
а) пропорциональнее регуляторы, или П-регуляторы (статические);
б) интегральные регуляторы или И-регуляторы (автоматические);
в) пропорционально – интегральные регуляторы, или ПИ-регуляторы (изодромные);
г) пропорционально-дифференциальные регуляторы, или ПД-регуляторы (пропорциональные регуляторы с предварением);
д) пропорционально - интегрально-дифференциальные регуляторы, или
ПИД-регуляторы (изодромные регуляторы с предварением);
По назначению : регуляторы температуры, давления, расхода и т. д.
В зависимости от выполняемой функции: регуляторы соотношения, программные, самонастраивающиеся" стабилизирующие.
8. Регулятор температуры прямого действия. Регулятор, у которого регулирующий орган перемещается за счет энергий самого объекта, воздействующего на чувствительный элемент, называется регулятором прямого действия. Системы регулирования, использующие регуляторы прямого действия, называются системами прямого регулирования.
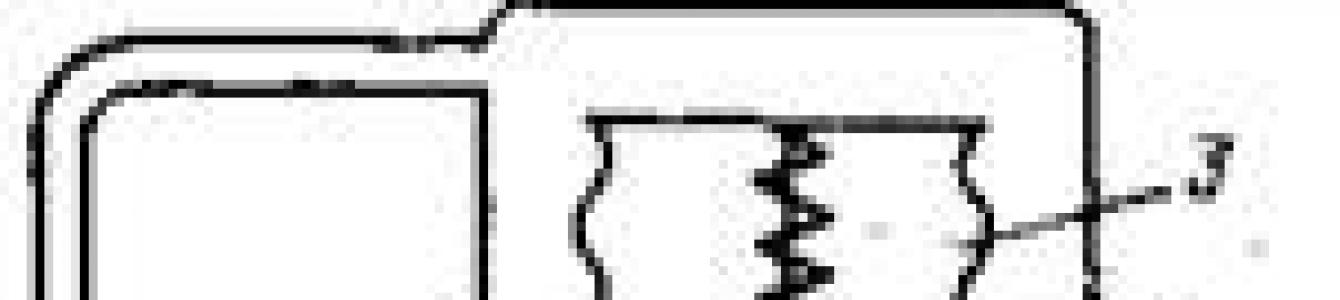
Рассмотрим работу регулятора температуры прямого действия типа РПД (рис. 1. Этот регулятор состоит из термометрической системы и клапана.
Термометрическая система регулятора представляет собой паровой манометрический термометр, в состав которого входят термобаллон 1, капилляр 2 и сильфон 3. Термометрическая система частично заполнена низкокипящей жидкостью, температура кипения которой ниже нижнего предела регулируемой температуры.
При погружении термобаллона в измеряемую среду в термометрической системе устанавливается давление паров рабочей жидкости, величина которого соответствует температуре измеряемой среды. Давление, возникающее в термобаллоне, передается через пар рабочей жидкости по капилляру к сильфону. В сильфоне развивается усилие, пропорциональное его эффективной площади; это усилие уравновешивается усилием пружины 4. Если температура регулируемой среды выше заданного значения, то усилие, развиваемое сильфоном 5, больше усилия пружины 4, вследствие чего сильфон сжимается и при помощи штока 5 перемещает золотник 6 регулирующего клапана вниз. При этом проходное сечение клапана и количество нагревающего вещества, проходящего через клапан, уменьшаются; в результате температура среды понижается и достигает заданного значения. При понижении температуры регулируемой среды сильфон растягивается и клапан приоткрывается, увеличивая подачу нагревающего вещества, вследствие чего температура повышается до заданного значения.

Регуляторы, которые воздействуют на регулирующий орган через усилительное устройство и исполнительный механизм, питаемый от внешнего источника энергии, называются регуляторами непрямого действия .
В регуляторе непрямого действия при изменении регулируемой величины усилие или энергия, возникающие в чувствительном элементе, приводят в действие впомогательное устройство, перемещающее регулирующий орган за счет энергии постороннего источника (электрического тока, жидкости под давлением, сжатого воздуха).
Системы регулирования, использующие регуляторы непрямого действия, называются "системами непрямого регулирования.
На рис. 1 приведена схема непрямого регулирования уровня жидкости в сосуде. Измерительное устройство (поплавок 1) при помощи рычагов связано с подвижным электрическим контактом.2. Подвижный контакт может замыкаться с одним из неподвижных контактов: Б (больше) и М (меньше). В зависимости от того, с каким из этих контактов замкнется подвижный контакт, электродвигатель 3 вращается в ту или другую сторону. Через червячный редуктор и систему рычагов электродвигатель открывает или закрывает регулирующий орган - клапан 4, установленный на линии подвода жидкости Q 1 в бак.
 Если расход жидкости Q 2
из бака увеличится, то уровень воды в в нем уменьшится и поплавок 1
опустится. При этом подвижный контакт 2
коснется верхнего неподвижного контакта Б,
электрическая цепь замкнется, двигатель включится и будет вращаться в направлении открытия регулирующего клапана 4,
тем самым увеличивая приток воды в бак. Работа регулятора будет продолжаться до тех пор, пока в баке не восстановится заданный уровень жидкости я
подвижный контакт 2
не установится между неподвижными контактами Б
и М, в результате чего цепь двигателя будет отключена.
Если расход жидкости Q 2
из бака увеличится, то уровень воды в в нем уменьшится и поплавок 1
опустится. При этом подвижный контакт 2
коснется верхнего неподвижного контакта Б,
электрическая цепь замкнется, двигатель включится и будет вращаться в направлении открытия регулирующего клапана 4,
тем самым увеличивая приток воды в бак. Работа регулятора будет продолжаться до тех пор, пока в баке не восстановится заданный уровень жидкости я
подвижный контакт 2
не установится между неподвижными контактами Б
и М, в результате чего цепь двигателя будет отключена.
В описанном регуляторе непрямого действия перемещение регулирующего органа - клапана - производится электрическим исполнительным механизмом, использующим энергию от внешнего источника.
Регуляторы непрямого действия обладают высокой чувствительностью, развивают большое усилие и позволяют осуществить дистанционное управление регулирующим органом.
Похожая информация.
В системе автоматического регулирования можно выделить два основных функциональных элемента: объект управления (ОУ), устройство управления (УУ), или, как его часто называют, автоматический регулятор (АР). Основное назначение САР - поддерживать значение регулируемой величины на заданном уровне. Эту функцию в системе выполняет АР.
Автоматические регуляторы классифицируют, как и СЛУ: по принципу управления (по отклонению, возмущению, отклонению и возмущению); виду используемой энергии (электрические, пневматические, гидравлические и др.); виду регулируемой величины (температуре, давлению, уровню, перемещению и др.); характеру воздействия на ОУ (непрерывные, дискретные); алгоритму функционирования (стабилизации, слежения, адаптации, программному алгоритму).
Регуляторы различают также по конструктивному исполнению и законам управления. По конструктивному исполнению регуляторы могут быть приборные, аппаратные, модульные (элементные) и агрегатные (блочные).
В регуляторы приборного типа встроен измерительный прибор (автоматический потенциометр, мост, логометр, милливольтметр и др.), поэтому одновременно с показанием отклонения регулируемой величины происходит формирование сигнала управления.
В регуляторах аппаратного типа в одном корпусе объединены блок сравнения, измерительный блок, предназначенный для контроля конкретной физической величины.
Регуляторы агрегатного типа состоят из отдельных унифицированных блоков, различающихся по входным и выходным сигналам и выполняющих определенные функции. К ним относятся регуляторы «Каскад».
Автоматические регуляторы модульного типа состоят из отдельных модулей (элементов), выполняющих простейшие операции, что позволяет конструировать АР различного функционального назначения.
Регуляторы непрерывного, импульсного и цифрового действия работают по разным законам регулирования. На этом основании различают пропорциональные (П) регуляторы, интегральные (И), пропорциональноинтегральные (ПИ) и пропорционально-интегрально-дифференциальные (ПИД). Рассмотрим подробнее законы регулирования, на основе которых реализуются принципы действия названных регуляторов.
Законом регулирования называют математическую зависимость между управляющим воздействием регулятора (выходным сигналом регулятора) и отклонением e(t) действительного значения регулируемой величины у от заданного значения g 0 (входного сигнала регулятора). Выбор автоматических регуляторов определяется динамическими свойствами объекта управления, необходимой точностью регулирования и видом переходного процесса регулируемой величины, который допускается технологией производства. Ниже приведено описание основных промышленных регуляторов.
Пропорциональные регуляторы (П-регуляторы) имеют передаточную функцию
гдeU(p)- регулирующее воздействие; е(р) - сигнал рассогласования; k n - коэффициент усиления П-регулятора.
У данного регулятора на выходе формируется регулирующее воздействие
С увеличением k n статическая ошибка уменьшается, однако при этом уменьшается и устойчивость системы. Поэтому при выборе значения & п следует учитывать эти оба обстоятельства. Достоинство П-регуляторов - простота и быстродействие, а также малая динамическая ошибка в начале переходного процесса. Системы автоматического регулирования с таким регулятором обладают устойчивостью. Недостаток П-регуляторов - установившаяся статическая ошибка, приводящая к остаточному отклонению регулируемого параметра.
П-регулятор применяют в том случае, если по условиям эксплуатации допускаются статическая и малая динамическая ошибки.
Частота изменения возмущающих воздействий может быть большой, но они должны изменяться в узких пределах. Если объект характеризуется большим запаздыванием, то изменение нагрузок должно быть плавным.
Пропорционально-дифференциальный регулятор (ПД-регулятор) предназначен для снижения колебательных процессов в САР. В этих регуляторах в закон управления вводят производную от отклонения г. Передаточная функция ПД-регулятора имеет вид
Здесь к л - постоянный коэффициент обратной связи по скорости изменения ошибки s(f)- Дифференциальная составляющая демпфирует колебания, однако замедляет переходные процессы и ухудшает динамику системы управления.
Интегральный регулятор (И-регулятор) формирует на выходе регулирующее воздействие
где к и - коэффициент передачи (усиления) И-регулятора; Т и =1 / к п - постоянная времени интегрирования.
Постоянная времени интегрирования - это время, в течение которого с момента поступления на входе регулятора постоянного воздействия е = const сигнал на выходе регулятора достигнет значения, равного значению входного сигнала е. И-регулятор имеет передаточную функцию
Регуляторы с таким законом управления (И-регуляторы) воздействуют на ОУ пропорционально интегралу от отклонения регулируемой величины. Тем самым устраняется статическая ошибка, свойственная П-регуляторам. Вместе с тем И-регуляторам присуща большая динамическая ошибка и невысокое быстродействие, особенно в начале переходного процесса: в начальный момент входного воздействия И-регулятор вследствие своих инерционных свойств не успевает выработать достаточный управляющий сигнал. С увеличением k H уменьшаются динамическая ошибка, время регулирования, но при этом уменьшается и устойчивость САР.
И-регуляторы используют в тех случаях, когда условиями эксплуатации допускаются большие динамическая ошибка и время регулирования и не допускается статическая ошибка. И-регуляторы устанавливают на объектах с малым запаздыванием и плавным изменением возмущающих воздействий. И-регуляторы нельзя применять на ОУ без самовыравнива- ния, так как образованная система будет неустойчива.
Пропорционально-интегральный регулятор (ПИ-регулятор) реализует закон регулирования
Он воздействует на ОУ пропорционально отклонению регулируемой величины и интегралу от этого отклонения. ПИ-регулятор имеет передаточную функцию следующего вида:
Как следует из формулы (2.118), ПИ-регулятор можно получить, если соединить параллельно два регулятора: пропорциональный (П) с передаточной функцией W n {p) и интегральный (И) с передаточной функцией W H (р) (рис. 2.39, а). Интегральная составляющая обеспечивает компенсацию возможной установившейся ошибки. Уменьшение Г и ускоряет процесс компенсации, но при этом возможны колебания системы.
На рис. 2.39, б показана несколько видоизмененная схема ПИ-регулятора, называемого изодромньш регулятором. Закон регулирования для регулятора на рис. 2.39, б имеет вид
где Т т =---постоянная времени изодрома.
*iAi
Изодромньш регулятор имеет передаточную функцию следующего вида:
У регулятора, показанного на рис. 2.39, а, параметры настройки независимые, а у регулятора на рис. 2.39, б - взаимосвязанные.

Рис. 2.39.
ПИ-регулятор обладает преимуществами П- и И-регуляторов, т.е. быстро реагирует на изменение нагрузки (П-составляющая) и работает без статической ошибки (И-составляющая). Поэтому его широко применяют в САР. В случае отказа канала регулирования с интегральной составляющей ПИ-регулятор будет работать как П-регулятор, что повышает надежность его работы. ПИ-регуляторы устанавливают на объекты со значительным запаздыванием при возмущающих воздействиях, изменяющихся с большой частотой и в широких пределах.
Пропорционально-интегрально-дифференциальный регулятор (ПИД- регулятор) улучшает точность и динамические свойства системы регулирования. Он реализует следующий закон регулирования:
ПИД-регулятор имеет передаточную функцию вида
где Т - постоянная времени дифференцирования (время предварения).
В начальный момент времени ПИД-регулятор оказывает на ОУ регулирующее воздействие пропорционально скорости изменения, т.е.
которая затем уменьшается до значения, определяемого П-составляющей. После этого начинает влиять И-составляющая. Таким образом, ПИД- регулятор обладает преимуществами ПИ-регулятора и оказывает на ОУ регулирующее воздействие, пропорциональное скорости изменения e(t), что позволяет ускорить процесс регулирования.
ПИД-регулятор обладает еще одним положительным качеством - реакцией на скорость изменения нагрузки, что повышает качество технологического процесса. Такой регулятор устанавливают на объектах со скачкообразной, нечасто изменяющейся нагрузкой.
Управление объектами с самовыравниванием возможно по пропорциональному (П-регулятор) или пропорционально-интегральном}" (ПИ-регулятор) законам регулирования. В последнем случае статическая ошибка равна нулю при постоянном входном воздействии. Если объект управления описывается дифференциальными уравнениями второго порядка, то применяют пропорционально-интегрально-дифференциаль- ный (ПИД-регулятор) закон регулирования.
Комбинированные регуляторы обеспечивают более эффективный метод повышения точности и улучшения динамических характеристик САР. Кроме обратных связей по отклонению они содержат прямые связи по задающему и возмущающему воздействиям, которые осуществляют компенсацию этих воздействий. В этом случае регулятор выбирается как П- или ПД-регулятор.
На большинстве сельскохозяйственных объектов установлены двух- и трехпозиционные регуляторы, имеющие такие же статические характеристики, как и у релейных элементов. Наиболее распространены двухпозиционные регуляторы, имеющие два органа настройки: задатчик и дифференциал. Характер изменения регулируемой величины при переключениях двухпозиционного регулятора определяется видом ОУ (с самовыравниванием или без него).
2 Автоматический регулятор Автоматический регулятор это совокупность устройств при помощи которых автоматически поддерживается значение регулируемой величины с той или иной точностью по отношению к заданному значению. Зависимость μ = f σ в неустановившемся режиме называется законом регулирования регулятора где σ = Ттек Тзад сигнал рассогласования μ закон перемещения затвора регулирующего органа t время. Динамическая характеристика регулятора как динамического звена...
Поделитесь работой в социальных сетях
Если эта работа Вам не подошла внизу страницы есть список похожих работ. Так же Вы можете воспользоваться кнопкой поиск
2.2 Автоматический регулятор
- Автоматический регулятор это совокупность устройств, при помощи которых автоматически поддерживается значение регулируемой величины с той или иной точностью по отношению к заданному значению .
Зависимость μ = f (σ ) в неустановившемся режиме называется законом регулирования регулятора, где σ = (Т тек Т зад ) сигнал рассогласования, μ закон перемещения затвора регулирующего органа, t время. Здесь:
Т тек текущее значение регулируемого параметра;
Т зад заданное значение регулируемого параметра.
Динамическая характеристика регулятора как динамического звена рассматривается всегда в следующих координатах:
В зависимости от закона регулирования регулятора бывают линейные и нелинейные.
В настоящее время роль регуляторов выполняют программируемые контроллеры. В них запрограммирован закон регулирования (чаще всего ПИД закон).
Классификация линейных регуляторов
- П-регулятор (пропорциональный);
- И-регулятор (интегральный);
- ПИ-регулятор (пропорционально-интегральный (изодромный));
- Регуляторы с предварением (с опережением):
- ПД-регулятор;
- ПИД-регулятор
Из нелинейных регуляторов самый популярный позиционный регулятор.
Рассмотрим смысл закона регулирования регулятора на примере САР температуры целевого продукта в теплообменнике. Эта схема нам уже известна. Это САР по отклонению. Здесь σ сигнал рассогласования 90º 100º = 10 ºС = σ. Закон регулирования регулятора (контроллера) определяет характер перемещения затвора регулирующего органа в новое положение.
На место регулятора (контроллера) в данной схеме будем поочередно ставить линейные регуляторы и будем наблюдать, как регулирующее воздействие μ от каждого закона регулирования влияет на характер перемещения затвора регулирующего органа.
П-регулятор
Это регулятор, у которого μ пропорционально σ, т.е.
μ = Кσ.
При скачке входной величины σ на значение (10ºС) затвор регулирующего органа переходит в новое μ - положение скачком (рис.2.10).
Рис.2.10. Закон регулирования П-регулятора.
Достоинство такого регулирования: регулирующий орган быстро перемещается на новое положение, т.е. высокая скорость регулирования ( t время).
Недостаток : имеет место остаточное отклонение, т.е. имеет место некоторая ошибка регулирования.
И-регулятор
Это регулятор, у которого μ пропорционально интегралу σ
При скачке входной величины на значение (10ºС) затвор регулирующего органа медленно переходит в новое положение (рис.2.11).
Рис.2.11. Закон регулирования И-регулятора.
Достоинство : отсутствие остаточного отклонения регулируемого параметра от заданного значения.
Недостаток : низкая скорость регулирования, т.е. затвор в новое положение перемещается медленно.
ПИ-регулятор
Это параллельное соединение предыдущих двух регуляторов (П и И - регуляторов). Этот регулятор сочетает положительные моменты П и И -регуляторов. У ПИ-регулятора (рис.2.12) регулирующее воздействие μ перемещает затвор пропорционально отклонению параметра σ и интегралу отклонения σ.
где: К, Т и параметры настройки регулятора. Как видим, формула данного закона это сумма двух предыдущих формул. Затвор регулирующего органа часть пути пройдет скачком по П-закону , а оставшуюся часть медленно по И - закону .
Рис.2.12. Закон регулирования ПИ-регулятора.
Регуляторы с предварением
ПД-регулятор
Это такой регулятор (рис.2.13), у которого выходной сигнал μ пропорционален входному сигналу σ и производной dσ / dt , т.е.
Рис.2.13. Закон регулирования ПД-регулятора.
Производная dσ / dt характеризует тенденцию изменения (отклонения) регулируемой величины. Величина и знак воздействия от производной позволяют регулятору как бы предвидеть в какую сторону и на сколько отклонилась бы регулируемая величина под действием данного возмущения. Это предвидение позволяет регулятору предварять своим воздействием возможное отклонение регулируемой величины. В результате процесс регулирования завершается в более короткое время.
Сначала затвор скачком переходит из точки а в точку в (П закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), и остаётся в этом положении.
ПИД-регулятор .
У него 3 родителя: П-регулятор, И-регулятор, ПД-регулятор. Соответственно складываются 3 формулы (рис.2.14.)
Здесь: К, Т и , Т д параметры настройки, которые можно настроить вручную.
Рис.2.14. Закон регулирования ПИД-регулятора.
ПИД - закон используется во всех контроллерах. Сначала затвор скачком переходит из точки а в точку в (П закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), а далее затвор медленно перемещается в конечное положение (И закон). В результате процесс регулирования завершается в более короткое время и с меньшей погрешностью регулирования.
С АР непрерывного и прерывного действия
В САР непрерывного действия при непрерывном изменении регулируемого параметра регулирующий орган перемещается непрерывно.
В САР прерывного действия при непрерывном изменении регулируемого параметра регулирующий орган перемещается прерывно. Соответственно САР прерывного действия делятся на: САР импульсные, САР релейные (позиционные).
В импульсных САР при непрерывном изменении регулируемого параметра регулирующий орган воздействует на объект отдельными импульсами. Период чередования импульса задается принудительно.
В релейных САР регулирующий орган воздействует только тогда, когда непрерывно изменяющаяся регулируемая величина достигает определенного значения или определенных значений. Частный случай релейных САР двухпозиционная САР. Например, изменение температуры в сауне по времени τ в диапазоне двух уставок (90-110) 0 С (рис.1.2). В качестве регулирующего органа в сауне используется контактная пара для включения и выключения ТЭНа. Регулирующий орган имеет всего 2 положения - контактная пара включена и выключена.
Рис.1.2. Изменение температуры в сауне по времени τ.
На практике чаще всего встречаются объекты с несколькими регулируемыми параметрами. Например, в аппарате надо поддерживать постоянное давление и при этом определенный температурный режим. Когда САР различных параметров связаны между собой через объект, то такие САР называются системами связанного регулирования.
Позиционный регулятор
У позиционных регуляторов регулирующее воздействие заставляет затвор срабатывать только при определённых отклонениях регулируемого параметра от заданной величины. Регулирующий орган позиционного регулятора может занимать ограниченное число определенных позиций. Перемещение из одного положения в другое происходит мгновенно. Примером может быть контактная пара (регулирующий орган) для включения ТЭНа в сауне. Регулирующий орган - контактная пара имеет только 2 позиции (вкл., выкл,). Наиболее распространены двухпозиционные регуляторы. При использовании двухпозиционной САР регулируемый параметр совершает незатухающие синусоидальные колебания (рис.2.15.).
Рис.2.15. Закон регулирования регулятора двухпозиционного регулятора.
Реальность в динамических характеристиках звеньев САР
- C качков не бывает (всё происходит во времени) (ПИД-регулятор).
2. В графиках нужно учитывать запаздывание (чистое (транспортное) τ 0 ; ёмкостное - τ ё )
Другие похожие работы, которые могут вас заинтересовать.вшм> |
|||
| 12167. | Программно-лингвистический комплексы РАМЕЯ (автоматизированное рабочее место языковеда для иероглифических языков)/и ЯРАП (японско-русский автоматический перевод) | 18.25 KB | |
| Комплекс РАМЕЯ предназначен для оптимизации работы русскоязычного пользователя с языками имеющими иероглифическую письменность прежде всего с японским и китайским. Комплекс обеспечивает более полный и разнообразный набор словарных и корпусных функций для русскоязычных пользователей чем какаялибо другая из существующих систем обработки текстов и данных на языках с иероглифической письменностью. Учитываются три основных вида работы: 1 выполнение и редактирование переводов текстов на языках с иероглифической письменностью; 2 поиск... | |||
| 12013. | Технология автоматической классификации транспортных средств на базе анализа видеоизображений, получаемых средствами видеофиксации (видеокамерами). Автоматический классификатор транспортных средств АКТС-4 | 1.02 MB | |
| Автоматический классификатор транспортных средств АКТС4. Разработка в качестве сенсора использует четыре видеокамеры видимого диапазона установленные перпендикулярно движению транспортных средств две на въезде на полосу движения пункта взимания платы две другие на выезде. Используемые в настоящее время в европейских странах автоматические классификаторы транспортных средств представляют собой оптические пары инфракрасных излучателей и датчиков. | |||
Ответ(22()
Применяемые в настоящее время в промышленности автоматические регуляторы можно классифицировать по ряду наиболее характерных признаков:
1. По назначению (виду регулируемой величины):
Регуляторы одной регулируемой величины (температуры, давления, состава);
Универсальные регуляторы,)Конец.
2. По способу действия (т.е. характеру воздействия на регулирующий орган):
Регуляторы прямого действия, которые не требуют постороннего источника энергии;
Регуляторы непрямого действия, у которых перемещение регулирующего органа производится за счёт энергии, подводимой извне.
3. По виду регулирования:
Стабилизирующие регуляторы, поддерживающие постоянное во времени значение физических величин;
Программные регуляторы, изменяющие значение регулируемых величин по заданной программе;
Следящие регуляторы, поддерживающие значение регулируемых величин в зависимости от изменения каких-либо других величин;
Самонастраивающиеся регуляторы, поддерживающие оптимальное значение регулируемых величин.
4. По времени действия:
Регуляторы непрерывного действия, у которых при непрерывном изменении регулируемой величины регулирующий орган перемещается непрерывно;
Регуляторы прерывистого (дискретного) действия, у которых при непрерывном изменении регулируемой величины регулирующий орган перемещается периодически только в случае достижения регулируемой величиной определённых значений или при прохождении определённого промежутка времени.
5. По роду используемой энергии:
Электрические регуляторы;
Гидравлические регуляторы;
Пневматические регуляторы:
Комбинированные регуляторы (электропневматические и электрогидравлические).
6. По закону регулирования (характеру регулирующего воздействия):
Позиционные (Поз-закон);
Пропорциональные или статические (П-закон);
Интегральные или астатические (И-закон);
Пропорционально-интегральные или изодромные (ПИ-закон);
Пропорциональные с предварением или пропорционально-дифференциальные (ПД-закон);
Изодромные с предварением или пропорционально-интсгрально-дифференциальные (ПИД-закон).
3.1.1. Классификация регуляторов по назначению (виду регулируемой величины).
АР подразделяются на регуляторы температуры, давления, уровня, частоты вращения, расхода и др.
3.1.2. Классификация регуляторов по принципу действия
По принципу действия (по характеру воздействия на регулирующий орган) автоматические регуляторы подразделяют на регуляторы прямого и непрямого (косвенного) действия.
Ответ23(
Регуляторы прямого действия . Это такие регуляторы, в которых регулирующий орган перемещается только за счет энергии, отбираемой измерительным устройством из объекта регулирования.
Пояснение. Такие регуляторы применяются для регулирования отдельных параметров. Они используются в тех случаях, когда по условиям эксплуатации нет необходимости в высокой точности регулирования, а для приведения в действие регулирующего органа не нужно больших усилий и чувствительный элемент обладает необходимой для этого мощностью.
Регуляторы прямого действия дешевы, просты по конструкции, надежны в эксплуатации и не требуют высокой квалификации обслуживающего персонала. Их область применения ограничивается простейшими объектами регулирования с благоприятными динамическими характеристиками.
Пример. Регулятор температуры прямого действия.
Рисунок 3.1. Регулятор прямого действия
а) конструкция регулятора, б) функциональная схема;
Автоматический
регулятор (АР) температуры (схема
конструкции которого представлена на
рис. 3.1,а, а его функциональная схема на
рис.3.1,б,) воспринимая изменения
регулируемой величины у
т
(текущее значение температуры) формирует
сигнал рассогласования
 управляющий регулирующим органом РО с
целью изменения регулирующего воздействия
х р
на объект регулирования.
управляющий регулирующим органом РО с
целью изменения регулирующего воздействия
х р
на объект регулирования.
Пояснение. Назначение элементов регулятора и принцип его действия состоит в следующем.
Измерительное устройство (термобаллон с легкокипящей жидкостью) воспринимает изменение регулируемой величины у Т (температуры) и преобразует его в параметр y ’ T (давление в манометрической системе), удобный для воздействия на другие элементы. С повышением температуры у т часть жидкости в термобаллоне выкипает и давление в y ’ T на донышко сильфона увеличивается, т.е. температура у Т преобразуется в давление y ’ T .
Задающее устройство ЗУ устанавливает параметр у зад , соответствующее требуемому протеканию технологического процесса. Установка у зад производится вручную Р оператором. В конструкции регулятора роль ЗУ выполняет сжатая пружина, натяжение которой осуществляется витком задания.
Элемент
сравнения ЭС (называемый иногда
сумматором) вырабатывает сигнал
рассогласования
 .
Конструктивно элемент сравнения выполнен
в виде рычага, который воспринимает
разность сил давления у’
T
и y
зад
вырабатываемых соответственно сильфоном
и пружиной.
.
Конструктивно элемент сравнения выполнен
в виде рычага, который воспринимает
разность сил давления у’
T
и y
зад
вырабатываемых соответственно сильфоном
и пружиной.
Одной из основных особенностей регуляторов прямого действия является то, что они не могут обеспечить постоянным значение регулируемой величины на всех установившихся режимах работы объектов.
Пример. Паровой котел (см. рис.1.5) работает в установившемся режиме при минимальном отборе пара G п min. Это означает, что подача воды в котел должна быть минимальной, т.е. питательный клапан КП максимально прикрыт. Поплавок, а значит и уровень Н воды должны занимать некоторое повышенное значение. Напротив, в установившемся режиме при максимальном отборе пара G п max, клапан КП должен быть открыт максимально, что возможно при более низком положении поплавка и уровня. Таким образом данному регулятору присуща падающая статическая характеристика, т.е. он работает с положительной неравномерностью регулирования (характеристика вида 1, рис.2.10).
Пояснение. Очевидно, если по условиям эксплуатации объектов требуется, чтобы на всех нагрузках регулируемые величины были строго постоянны, подобные регуляторы применяться не могут. Конструктивно у таких регуляторов можно уменьшать величину неравномерности регулирования, но сделать ее равной нулю невозможно. Если к тому же автоматизируемый объект не обладает свойством самовыравнивания, то чрезмерное уменьшение приведет к неустойчивой работе регулятора.
( Регуляторы непрямого действия .
Конструкция регулятора непрямого действия и его функциональная схема приведены на рис. 3.2. Если мощности сигнала ∆у недостаточно, для воздействия на регулирующий орган (РО), то используются регуляторы непрямого действия. Для перемещения РО используется исполнительное устройство ИУ, подключающее к регулятору внешний источник электрической энергии Е.
В качестве ИМ используется электромагнитное реле (магнитный пускатель), воздействующий на перемещение регулирующего органа РО.

Рисунок 3.2. . Регулятор непрямого действия
а) конструкция регулятора, б) функциональная схема; ;) Конец.
Автоматический регулятор частоты вращения включает в себя собственно механический регулятор с центробежными грузами и систему управляющих рычагов, обеспечивающих связь регулятора и элементов настройки с дозирующей муфтой.
Автоматический регулятор частоты вращения служит для поддержания заданного скоростного режима с заданной точностью. Точность регулирования оценивается, в частности, степенью неравномерности, которая определяется как отношение разности частот вращения режима холостого хода и заданного режима по внешней скоростной характеристике к среднему их значению. Практически степень неравномерности определяется наклоном регуляторной характеристики.
Режим холостого хода означает работу двигателя без нагрузки. Таким образом, работа автоматического регулятора заключается в изменении величины топливоподачи при изменении нагрузки и постоянном положении рычага управления, т.е. педали акселератора. При этом формируется регуляторная характеристика данного скоростного режима. Всережимный автоматический регулятор обеспечивает регулирование дизеля во всем диапазоне рабочих режимов, а водитель задает требуемый скоростной режим, нажимая на педаль акселератора.
Двухрежимный регулятор частоты вращения обеспечивает автоматическое регулирование режима пуска и минимального и номинального режимов, а все промежуточные режимы находятся под управлением водителя, который воздействует непосредственно на дозирующий орган, изменяя величину топливоподачи.
Двухрежимные регуляторы более предпочтительны на автомобильных дизелях, поскольку непосредственное воздействие на дозирующий орган уменьшает расход топлива и выброс частиц при работе на неустановившихся режимах.
Скоростные и регуляторные характеристики топливоподачи насоса VE со всережимным и двухрежимным регуляторами представлены на рисунках а, б. Соответствующие обозначения кривых и характерных точек даны в спецификации к рисунку.
Рис. Скоростные и регуляторные характеристики топливоподачи: а — с двухрежиммым регулятором; б — с всережимным регулятором; 1 — пусковая подача; 2 — подача при полной нагрузке; 3 — участок работы положительного корректора; 4 — регуляторные характеристики; 5 — холостой ход минимального режима
Всережимные регуляторы
Схемы работы всережимного регулятора частоты вращения топливного насоса VE с системой рычагов и рабочими положениями дозирующей муфты на различных нагрузочных и скоростных режимах показаны на рисунках а, б, в, г.

Рис. Работа всережимного регулятора: а — положение при пуске; б — холостой ход минимального режима; в — режим уменьшения нагрузки; г — режим увеличения нагрузки; 1 — грузы регулятора; 2 — муфта регулятора, 3 — силовой рычаг; 4 — нажимной рычаг, 5 — пружина пусковой подачи; 6 — дозирующая муфта; 7 — отсечные отверстия в плунжере; 8 — плунжер; 9 — регулировочный винт холостого хода минимального режима; 10 — рычаг управления; 11 — регулировочный винт максимального режима; 12 — ось рычага управления; 13 — рабочая пружина регулятора; 14 — фиксатор пружины; 15 — пружина минимального режима; 16 — упор силового рычага; М2 — ось вращения рычагов 4 и 5; h, и h2 активный ход плунжера на различных режимах
Грузы регулятора 1 (обычно четыре груза) установлены в держателе, который получает вращение от приводной шестеренки. Радиальное перемещение грузов трансформируется в осевое перемещение муфты регулятора 2, что изменяет положение нажимного 4 и силового 3 рычагов регулятора, которые, поворачиваясь относительно оси М2. перемещают дозирующую муфту 6,определяя тем самым активный ход плунжера 8.
В верхней части силового рычага установлена пружина холостого хода 15, а между силовым и нажимным рычагами — пластинчатая пружина пусковой подачи 5. Рычаг управления 10 воздействует на рабочую пружину регулятора 13. второй конец которой закреплен в силовом рычаге на фиксаторе 14. Таким образом. положение системы рычагов и. следовательно, дозирующей муфты определяется взаимодействием двух сил — силы предварительной затяжки рабочей пружины регулятора, определяемой положением рычага управления, и центробежной силы грузов, приведенной к муфте.
Работа регулятора при пуске дизеля
Перед пуском дизеля, когда коленчатый вал еще не вращается и топливный насос не работает, грузы регулятора находятся в состоянии покоя на минимальном радиусе, а нажимной рычаг 4 (его другое название — рычаг пуска) под действием пружины пусковой подачи 5 смещен влево на рисунке а, имея возможность качания относительно оси М2. Соответственно нижний шарнирный конец рычага обеспечивает крайне правое положение дозатора 6 относительно плунжера 8. что соответствует пусковой подаче за счет увеличенного активного хода плунжера h1. Как только двигатель запустится, грузы регулятора расходятся и муфта 2 перемещается вправо на величину хода «а», преодолевая сопротивление достаточно слабой пусковой пружины 5. Рычаг 4 при этом поворачивается на оси М2 по часовой стрелке, перемещая дозирующую муфту в сторону уменьшения подачи (влево на рис. б).
Работа регулятора на минимальной частоте вращения холостого хода
При отсутствии нагрузки и положении рычага управления на упоре в регулировочный винт 9 дизель должен устойчиво работать на минимальной частоте вращения холостого хода в соответствии со схемой рисунка б. Регулирование этого режима обеспечивается пружиной холостого хода 15. усилие которой находится в равновесии с центробежной силой грузов, и в результате этого равновесия поддерживается подача топлива, соответствующая активному ходу плунжера h2. Работа дизеля на этом режиме соответствует точке 5 на характеристике первого рисунка. Как только скоростной режим двигателя выходит за пределы минимальной частоты вращения холостого хода, реализуется ход «с» силового рычага при сжатии пружины 15 под действием увеличивающейся центробежной силы грузов.
Работа регулятора на нагрузочных режимах
В эксплуатации дизеля со всережимным регулятором скоростной режим устанавливается водителем путем воздействия через педаль акселератора на рычаг управления 10. На рабочих режимах пружина пусковой подачи 5 и пружина 15 холостого хода не работают, и работа регулятора определяется предварительной деформацией рабочей пружины 13. При повороте рычага управления до упора 11 (рисунки в, г) в сторону увеличения скоростного режима и соответствующем растяжении рабочей пружины ее усилие передается на силовой рычаг 3 и затем через рычаг 4 на муфту регулятора 2, заставляя грузы 1 сходиться. Система рычагов при этом поворачивается относительно оси М2 против часовой стрелки на рисунке, перемещая дозирующую муфту 6 в сторону увеличения подачи до режимов внешней скоростной характеристики. Частота вращения коленчатого вала дизеля и соответственно, грузов регулятора при этом увеличивается, центробежная сила грузов и сопротивление последней усилию рабочей пружины также увеличиваются, и в какой-то момент наступает равновесие сил и равновесие положения всех элементов регулятора. При отсутствии изменения нагрузки двигатель работает на установившемся режиме при постоянной частоте вращения (не принимая во внимание естественную для ЛВС нестабильность вращения).
Если на этом режиме имеет место изменение нагрузки, то в работу вступает автоматический регулятор в соответствии со схемами, показанными на рисунках в, г. При уменьшении нагрузки частота вращения увеличивается, грузы регулятора расходятся и, преодолевая сопротивление рабочей пружины, перемещают муфту регулятора вправо (рисунок в). Система рычагов при этом поворачивается относительно оси М2 по часовой стрелке перемещая дозирующую муфту влево, в сторону уменьшения подачи. В результате формируется регуляторная ветвь 4 на первом рисунке. Если рычаг управления устанавливается в некоторое промежуточное положение, то, по сравнению с настройкой регулятора, показанной на рисунках в, г, будет образовываться одна из регуляторных характеристик, показанных пунктиром на первом рисунке б, т.е. регулятор в последнем случае начинает работать раньше — при меньшей частоте вращения.
На рисунке г показана работа регулятора при положении рычага управления на упоре 11 и при увеличении нагрузки. В этом случае частота вращения вала дизеля уменьшается, грузы регулятора сходятся, центробежная сила грузов уменьшается, и под действием усилия рабочей пружины муфта регулятора перемещается влево, а система рычагов 3 и 4 перемещает дозирующую муфту вправо, в сторону увеличения подачи. Если дизель до начала увеличения нагрузки работал на регуляторной ветви, то при увеличении подачи он будет выходить на более мощностной режим и затем на внешнюю скоростную характеристику. Если же дизель работает на внешней характеристике на номинальном или близком к нему режиме, то при увеличении нагрузки реализуется режим перегрузки, для преодоления которой дизель должен иметь достаточно высокий коэффициент приспособляемости. Положительное корректирование топливоподачи осуществляется на участке 3 характеристики с помощью положительного корректора или при соответствующем подборе характеристики топливоподачи ТНВД.
Корректоры топливоподачи
Корректирование топливоподачи в дизелях, положительное или отрицательное, осуществляется с целью формирования внешней скоростной характеристики двигателя при необходимости увеличить максимальный крутящий момент путем увеличения подачи при уменьшении частоты вращения от nном до nm на так называемом режиме перегрузки (положительное корректирование) или уменьшить дымление дизеля при работе на n < nm по внешней скоростной характеристике. Влияние корректирования на протекание внешней скоростной характеристики дизеля показано на рисунке ниже. Положительное корректирование необходимо для обеспечения заданного запаса крутящего момента двигателя.

Рис. Внешняя характеристике дизеля: Мe — крутящий момент, n — частота вращения, nм — частота вращения при максимально Me, nном — частота вращения номинального режима, n мин — минимальная частота вращения по внешней характеристике
Корректирование характеристики может быть осуществимо нагнетательным клапаном ТНВД или механическим корректором в регуляторе. С помощью механического корректора осуществляется также и отрицательное корректирование. Последнее обычно применяется в двигателях с целью уменьшения выбросов сажи при n < nм1, а также в двигателя с турбонаддувом и ТНВД без корректора по давлению наддува, т.е. без ограничения подачи в системе LDA.
Работа положительного и отрицательного корректоров
Устройство и работа положительного и отрицательного механических корректоров топливоподачи топливного насоса VE иллюстрируется рис. а, б.

Рис. Схема регулятора с положительным (а) и отрицательным (б) корректором топливоподачи: 1 — рычаг пусковой; 2 — пружины корректоров; 3 — рабочая пружина регулятора; 4 — силовой рычаг 5 — упор; 6 — рычаги корректоров; 7 — шток корректора; 8 — дозирующая муфта; 9 — пружина пусковой подачи; 10 — муфта регулятора; 11 — точка упора; Мг — ось вращения рычагов 1 и 4; М4 — ось вращения рычагов 1 и 6; ΔS — ход корректирования подачи
Начало действия прямого (положительного) корректора топливоподачи определяется жесткостью и предварительным сжатием его пружины, которые согласованы с соответствующим скоростным режимом дизеля. Работа положительного корректора происходит следующим образом. На номинальном режиме дозирующая муфта 8 занимает положение, обозначенное пунктиром на рис. а. Пружина корректора 2 при этом сжата из-за воздействия центробежной силы грузов через муфту 10 регулятора на рычаг 6, который нажимает на головку штока 7, поворачиваясь на упоре 5 в силовом рычаге 4. Рычаг 1 при этом повернут по часовой стрелке и дозатор обеспечивает цикловую подачу, которая соответствует требованиям номинального режима дизеля (см. Пунктир на рис. а). Если нагрузка на этом режиме увеличивается (режим перегрузки), частота вращения уменьшается, усилие со стороны муфты регулятора также уменьшается, и пружина корректора 2 через рычаг 6 поворачивает рычаг 1 против часовой стрелки, перемещая дозирующую муфту вправо, в сторону увеличения подачи на величину ΔS (рис. а).
Работа отрицательного корректора
При работе с минимальной частотой на внешней характеристике рычаг 6 корректора упирается в силовой рычаг в точке 5 (рис. б). Головка штока 7 корректора также упирается в силовой рычаг 4. При увеличении частоты вращения центробежная сила грузов, приведенная к муфте, преодолевает усилие пружины 2 корректора, сжимая ее. в результате чего рычаг 6 перемещается вправо на рисунке, в сторону головки штока, при этом общая ось рычагов М4 меняет свое положение. Одновременно рычаг 1 поворачивается относительно оси М2, перемещая дозирующую муфту 8 в сторону увеличения подачи. Ход корректирования ΔS определяется ходом сжатия пружины корректора до упора рычага 6 в головку штока 7. При работе дизеля на левой части внешней скоростной характеристики при увеличении нагрузки и уменьшении частоты вращения пружина 2 поворачивает рычаг 6 по часовой стрелке, а последний заставляет поворачиваться рычаг 1 относительно оси М2 по часовой стрелке, перемещая дозирующую муфту 8 в сторону уменьшения подачи, осуществляя, таким образом, отрицательное корректирование (область nмин < n < nм на рисунке).
Двухрежимные регуляторы
Устройство двухрежимного автоматического регулятора частоты вращения топливного насоса VE и его работа на различных режимах показаны на рисунках далее, имеющих общую спецификацию. Вал регулятора получает вращение от вала ТНВД через шестеренчатую повышающую передачу с передаточным отношением 1:1,6 и передает его держателю с четырьмя грузами.
Аналогичную конструкцию этого узла имеют топливные насосы VE с всережимными регуляторами, рассмотренные выше.
Величина топливоподачи изменяется при изменении положения дозирующей муфты 15, которое определяется равновесием центробежной силы грузов, приведенной к муфте, и силы от действия рабочих пружин регулятора, зависящей, в частности, от положения педали акселератора.
Режим пуска дизеля показан на рисунке. При неработающем двигателе грузы регулятора сведены и муфта 19 находится в крайнем левом положении. Рычаг корректора 16 и пусковой рычаг 18 прижимаются под действием пружины пусковой подачи 12 к муфте регулятора 19, поворачиваясь относительно оси М2. Таким образом, дозирующая муфта 15 перемещается нижним шарниром системы рычагов вправо на рисунке ниже, обеспечивая пусковую подачу. Педаль акселератора при пуске дизеля может оставаться в ненажатом положении. Величина пусковой подачи определяется активным ходом ΔS1.

Рис. Схема двухрежимного регулятора. Режим пуска дизеля: 1 — держатель грузов; 2 — грузы регулятора; 3 — серьга; 4 — ось рычага управления; 5 -пружина номинального режима; 6 — пружина частичного режима; 7 — регулировочный винт максимальной подачи; 8 — демпферная пружина; 9 — пружина холостого хода минимального режима; 10 — силовой рычаг; 11 — регулировочный рычаг; 12 — пружина пусковой подачи; 13 — поддерживающая пружина; 14 — плунжер ТНВД; 15 — дозирующая муфта; 16 — рычаг отрицательного корректора; 17 — пружина отрицательного корректора; 18 — пусковой рычаг; 19 — муфта регулятора; 20 — корпус пружин регулятора; 21 — отверстия отсечки подачи; шарниры рычажной системы регулятора: М1 — система рычагов в этой точке поддерживается двумя подвижными пальцами, установленными в рычаге 2; М4 — общая ось рычагов пускового и корректора; ΔS1 — ход дозирующей муфты.
После пуска двигателя грузы регулятора под действием центробежной силы расходятся и толкают муфту регулятора 19 вправо, преодолевая сопротивление пружины пусковой подачи 12. При этом головка штока рычага корректора 16 упирается в точке А в силовой рычаг 10, а ось М4 движется вправо на шарнире А до тех пор, пока усилие муфты регулятора окажется равным усилию пружины холостого хода 9. Соответственно, дозирующая муфта 15 перемещается шарниром М2 влево до установления подачи холостого хода, что соответствует схеме на рисунке.

Рис. Работа регулятора на холостом ходу минимального режима
На рисунке показано взаимодействие элементов регулятора при работе дизеля на частичных скоростных режимах, когда педаль акселератора слегка нажата. Последовательность, с которой вступают в работу пружины регулятора, определяется их жесткостью и предварительной деформацией. Первой работает демпферная пружина 8. за ней следует пружина частичного режима 6 и, наконец, пружина номинального режима 5.
Рычаг управления соединяется с педалью акселератора. При нажатии на нее сжимается демпферная пружина 8 и силовой рычаг притягивается влево, в результате чего дозирующая муфта перемещается вправо, в сторону увеличения подачи с соответствующим увеличением частоты вращения. Муфта регулятора 19 из-за увеличения центробежной силы грузов нажимает на рычаг корректора, который упирается.в силовой рычаг в точке в результате чего пружина холостого хода 9 максимально сжимается, и далее силовой рычаг уже двумя шарнирными точками А и В перемещается вправо, вместе с осью М2. В этих условиях, когда силовой рычаг движется вправо, а корпус пружин под действием водителя влево, пружина частичной нагрузки сжимается до момента достижения баланса сил. При уменьшении нагрузки и увеличении частоты вращения силовой рычаг будет перемещаться под действием муфты регулятора 19 вправо на ход ΔS2 пружины 6, а дозирующая муфта 15 влево, в сторону уменьшения подачи до достижения установившегося скоростного режима дизеля.

Рис. Работа регулятора на частичном скоростном режиме

Рис. Работа регулятора при полной нагрузке
Работа регулятора дизеля при полной нагрузке иллюстрируется рисунке. В этом случае педаль акселератора нажата до упора рычага управления в регулировочный винт максимального режима. Силовой рычаг 10 при этом оказывается на упоре М3, а пружины стартовая, минимального холостого хода 9, демпферная 8 и частичной нагрузки 6 — в полностью сжатом состоянии. Муфта регулятора 19 находится в равновесии под действием противоположно направленных центробежной силы грузов и силы предварительной затяжки рабочей пружины 5. Подача топлива на режиме полной нагрузки определяется активным ходом плунжера, обозначенным двумя стрелками у дозирующей муфты 15. Рассматриваемый здесь двухрежимный регулятор оснащен отрицательным корректором топливоподачи. При работе дизеля на левой ветви внешней скоростной характеристики, при n < nm пружина 17 отрицательного корректора разжимается и через систему рычагов перемещает дозирующую муфту 15 в сторону уменьшения подачи, отодвигая внешнюю характеристику от предела дымления.

Рис. Работа отрицательного корректора
Режим максимальной частоты вращения холостого хода и формирование соответствующей регуляторной характеристики имеют место при уменьшении нагрузки двигателя, работающего на режиме полной (номинальной) мощности. В этом случае частота вращения вала двигателя и грузов регулятора увеличивается, и последние перемещают муфту 19 вправо, которая заставляет пружину регулятора 5 сжиматься и за счет этого вращает систему рычагов по часовой стрелке относительно оси М2, уменьшая топливоподачу до величины подачи холостого хода. Этот процесс показан на рисунке.
Если при полном сбросе нагрузки имеет место неконтролируемое увеличение частоты вращения, опасное для двигателя, регулятор полностью прекращает подачу топлива в цилиндры дизеля. В этом случае работа регулятора происходит в соответствии с рисунке, только при частоте вращения большей, чем на режиме максимальной частоты вращения холостого хода. Дозирующая муфта при этом еще больше перемещается влево, полностью открывая отсечные отверстия 21, в результате чего все топливо из камеры высокого давления ТНВД возвращается во внутреннюю полость корпуса насоса и впрыскивание топлива прекращается.

Рис. Работа регулятора на холостом ходу максимального режима
График скоростных характеристик топливоподачи рассмотренного выше двухрежимного регулятора показан на рисунке, назначение различных кривых на характеристике обозначено подрисуночными подписями. Наличие пружины частичных режимов в регуляторе позволяет получить большую плавность и устойчивость регулирования на режимах малых нагрузок и частот вращения. В остальном характеристики рассмотренного выше двухрежимного регулятора аналогичны общей характеристике.

Рис. Скоростные характеристики топливоподачи ТНВД с двухрежимным регулятором: а — пусковая подача, б — участок уменьшения подачи после пуска дизеля, в — ход при сжатии пружины частичного режима, г — область управления подачей водителем, д — регуляторные характеристики максимального режима